
Ilustración del robot utilizado por los investigadores. Crédito:Nordmoen et al.
Uno de los desafíos clave para la investigación en robótica es el desarrollo de sistemas de control eficaces y resistentes, que permiten a los robots navegar en una variedad de entornos y lidiar con eventos inesperados. Investigadores de la Universidad de Oslo han desarrollado recientemente una técnica de coordinación de fase incorporada evolucionada para la locomoción robusta de robots cuadrúpedos. Su trabajo, publicado en arXiv, fue patrocinado en parte por el Consejo de Investigación de Noruega.
"El factor que nos motivó fue la observación de que algunos comportamientos de robots que entrenamos en simulación no funcionaron correctamente cuando se probaron en el robot real, "Jørgen Nordmoen, uno de los investigadores involucrados en el estudio, dijo a TechXplore. "Esta observación es un desafío conocido, a menudo llamado 'la brecha de la realidad, 'y queríamos ver si el uso de datos de sensores podría ayudar a superar este desafío ".
Para reducir efectivamente la 'brecha de la realidad' que se observa a menudo en los estudios de robótica, Nordmoen y sus colegas querían combinar generadores de patrones centrales (CPG) con retroalimentación del cuerpo y los sensores del robot. Las CPG son un método popular para generar ondulaciones rítmicas o patrones motores en robots, que se puede utilizar como apuntalamiento del movimiento. Las GPC artificiales están inspiradas en la médula espinal de los animales, que se sabe que contienen neuronas que generan señales rítmicas en ausencia de información sensorial.
"Los CPG son relativamente sencillos de entrenar, sin embargo, no incorporan por sí mismos ninguna información sobre el mundo exterior, ", Dijo Nordmoen." Nuestros principales objetivos eran ver si podíamos combinar con éxito una red CPG compleja con la coordinación de fase incorporada y si la incorporación de datos de sensores podría mejorar el comportamiento del robot en el mundo real ".
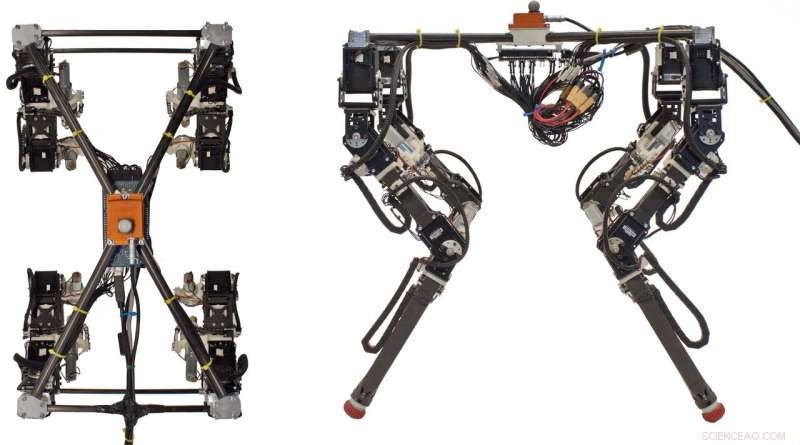
Imágenes del robot utilizado por los investigadores. Crédito:Nordmoen et al.
Las técnicas de coordinación de fases incorporadas funcionan detectando la cantidad de presión ejercida por el robot en cada uno de sus pies, utilizando esta medida para controlar la sincronización de sus patas. En su estudio, los investigadores emplearon un enfoque minimalista llamado TEGOTAE, que utiliza la retroalimentación del sensor para el acoplamiento de fase emergente entre las piernas del robot.
Generalmente, en robots con patas, cada pierna está explícitamente coordinada con las demás, lo que significa que una pierna siempre conoce la posición relativa de otras piernas. A diferencia de, en el enfoque de coordinación de la fase incorporada ideado por Nordmoen y sus colegas, cada pierna está desacoplada de las demás y el propio cuerpo impone implícitamente la sincronización entre las piernas. El sensor de presión del pie agregado por los investigadores permite la sincronización implícita, mejorando en última instancia la coordinación del robot.
"Nuestro método utiliza una GPC más compleja que otros enfoques, utilizando la coordinación de fase incorporada y realizando los experimentos en un robot más complejo, "Dijo Nordmoen." Además, entrenamos a la GPC mediante un algoritmo de optimización evolutiva, que junto con la coordinación de fases incorporada permite que el ritmo de la marcha se adapte automáticamente al robot y al entorno ".
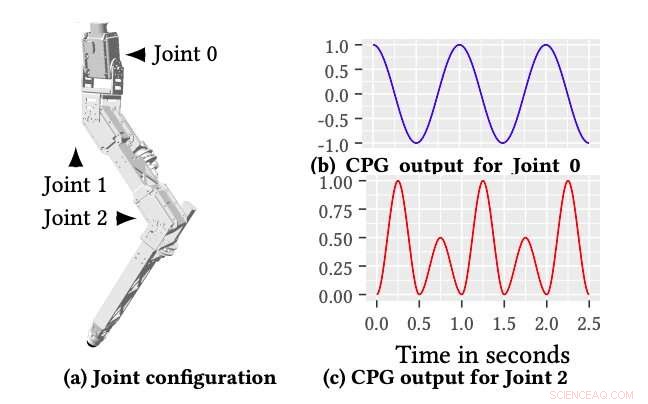
(a) muestra una representación visual de una pierna del robot con las articulaciones marcadas. (b) muestra un ejemplo de curva de control para la articulación 0 y la articulación 1, mientras que (c) muestra un ejemplo de curva de control para la articulación 2. Crédito:Nordmoen et al.
En su estudio, los investigadores aplicaron su método a DyRET, un robot de cuatro patas con morfología de mamífero. Primero entrenaron al robot cuadrúpedo en simulaciones, y posteriormente transfirieron sus pruebas al mundo real para verificar si el entrenamiento fue efectivo. Esto les permitió evaluar su técnica antes de aplicarla en escenarios del mundo real sin causar daños al robot.
"Hablando practicamente, nuestro trabajo podría dar lugar a robots con patas que se adapten mejor a su entorno, manejando así diferentes entornos, ", Dijo Nordmoen." Esto incluye facilitar la transferencia de controladores de robot de la simulación al mundo real. Como escribimos en el periódico, los robots con patas tienen la posibilidad de ayudar en los términos del usuario con pocos ajustes necesarios por parte del usuario en comparación con los robots con ruedas ".
La técnica ideada por Nordmoen y sus colegas podría facilitar el desarrollo de robots con habilidades de locomoción más sólidas. En el futuro, otros investigadores podrían integrar el enfoque en sus robots o inspirarse en este estudio para desarrollar técnicas similares. Según Nordmoen, las dificultades asociadas con la integración de la retroalimentación del sensor en los robots con patas y la simplicidad de este nuevo enfoque de coordinación de fases incorporada podrían ser un excelente punto de partida para futuras investigaciones.
"Actualmente estamos trabajando para comprender mejor el mecanismo que subyace a la coordinación de la fase incorporada, ", agregó." Es de esperar que esto nos permita mejorar el concepto y generar mejores estrategias de movimiento. Además, nos gustaría ver cómo se ve afectada la coordinación de fase incorporada si el propio robot cambia. Con nuestro robot único, DyRET, tenemos la capacidad de alterar la morfología del robot y podemos probar cómo estos cambios influirían en nuestro enfoque ".
© 2019 Science X Network














