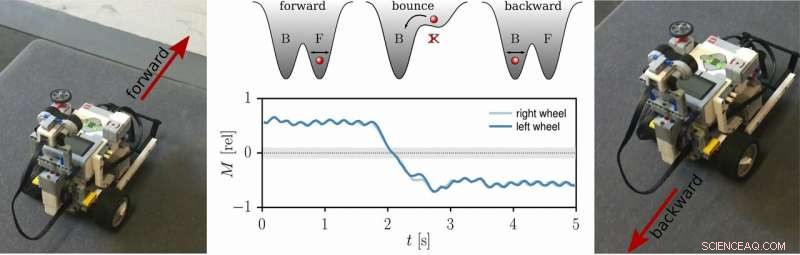
Representar cómo el robot cambia de forma autónoma las direcciones de locomoción al chocar contra una pared. Crédito:Sándor et al.
Un equipo de investigadores de la Universidad Babes-Bolyai, En Rumania, y la Universidad Goethe de Frankfurt han colaborado recientemente en un estudio que explora las implementaciones del control de patadas en robots con ruedas simulados y del mundo real. El término 'control de patada' se refiere a corto, Órdenes de orden superior que se pueden usar para "patear" un sistema de un atractor autoorganizado a la cuenca de atracción de otro atractor.
"Cuando nos movemos, nuestros músculos simplemente reaccionan a las señales que envía el cerebro, o tienen en cuenta también el estado de las articulaciones, de los tendones y de los músculos mismos? ", preguntó Claudius Gros, uno de los investigadores que realizó el estudio. "Se habla de 'locomoción encarnada, 'si esto último es el caso. Nuestra investigación está dedicada a investigar cómo la encarnación ayuda a los animales y robots a navegar por el mundo ".
En naturaleza, incluso los animales con sistemas nerviosos simples pueden navegar en una variedad de entornos complejos. Para moverse por entornos conocidos y desconocidos, Los robots deben tener habilidades sensomotoras similares. Hasta aquí, sin embargo, Los científicos e ingenieros de todo el mundo han estado luchando por diseñar robots con capacidades motoras que se asemejen a las de los humanos y los animales.
"Coordinar un gran número de actuadores en un entorno en constante cambio es sin duda una tarea desafiante, "Bulcsú Sándor, otro investigador involucrado en el estudio, dijo a TechXplore. "Entonces, ¿por qué no dejamos que el cuerpo del robot haga el trabajo duro? asumiendo una parte sustancial del cálculo? Siguiendo esta idea, sugerimos un esquema de control alternativo en el que los patrones de movimiento se generan de manera autoorganizada. En este marco, la locomoción se crea a través de una interacción dinámica entre el cerebro y el cuerpo del robot, y el medio ambiente ".
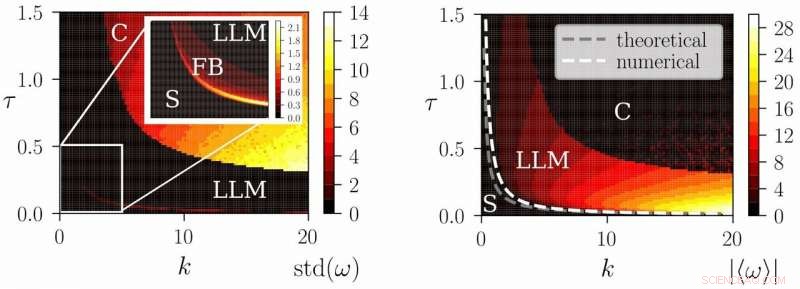
Diagrama de fases del sistema:comportamientos dinámicos en función de los parámetros del controlador.
Sándor, Gros y sus colegas idearon un marco de control en el que los movimientos no se definen rígidamente, sino que se describen mediante un conjunto de ecuaciones para controlar actuadores que cambian dinámicamente, incorporando la información propio-sensorial del cuerpo. Luego probaron y refinaron estas ecuaciones en el entorno de simulación LPZRobots.
"Debido a la interacción del robot con su entorno, Se pueden crear varios patrones de movimiento autoorganizados, "Dijo Sándor." Esto nos permite cambiar entre estas primitivas de comportamiento mediante una señal de control similar a una patada bien definida. Esto es lo que llamamos "control de patada". Finalmente, como prueba de concepto, implementamos esta idea en robots con ruedas del mundo real ".
Coordinar la contracción de muchos músculos del cuerpo es una tarea muy desafiante, que es adquirido de forma innata por la mayoría de los seres humanos y animales. En su estudio, Sándor, Gros y sus colegas intentaron idear un método más sencillo para inculcar habilidades motoras a los robots.
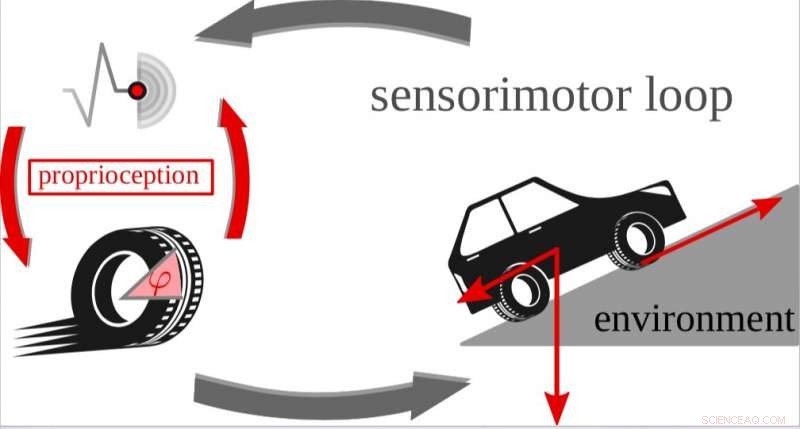
Esquema de un bucle sensoriomotor compatible, capaz de adaptarse al entorno. Crédito:Sándor et al.
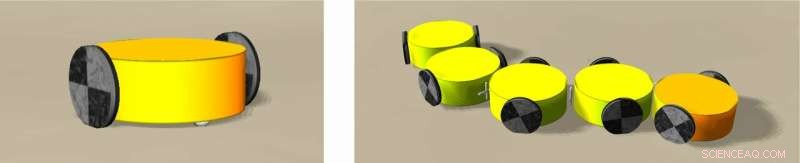
Robots simulados (un coche, 5 vagones conectados a un tren). Crédito:Sándor et al.
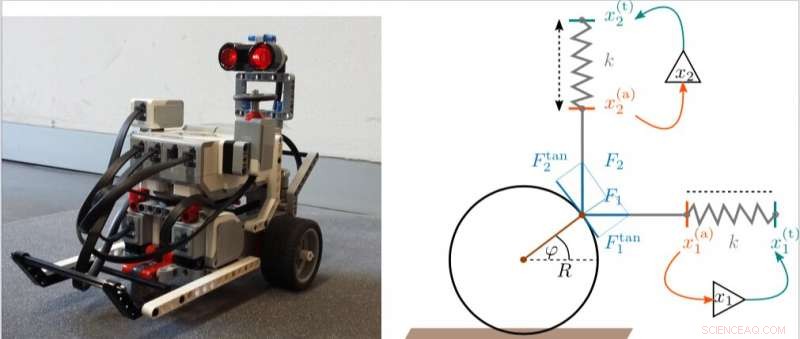
Robot Lego y el mecanismo de control que usamos. Crédito:Sándor et al.
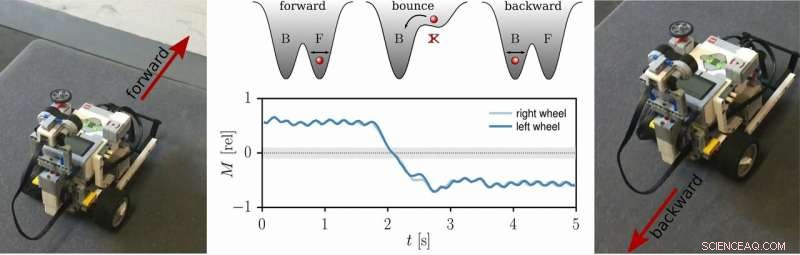
Representar cómo el robot cambia de forma autónoma las direcciones de locomoción al chocar contra una pared. Crédito:Sándor et al.
"¿No sería mucho más sencillo si el cerebro diera una pequeña señal de patada y el cuerpo de un animal o de un robot realizara un movimiento bien coordinado por sí mismo?" Dijo Gros. "Esta es la idea clave detrás del control de patadas. Se puede realizar, como descubrimos, cuando el robot dispone de actuadores autoorganizados ".
Los investigadores evaluaron su marco en robots con ruedas simulados y del mundo real, generando la dinámica de distintas ruedas de forma independiente a través de bucles de retroalimentación local. Estos bucles de retroalimentación están mediados por neuronas que codifican la velocidad, que procesan entradas propriosensoriales que describen el ángulo de rotación real de cada rueda. Después, una varilla de transmisión simulada que se asemeja a las que se utilizan en las locomotoras de vapor traduce los cambios en la actividad neuronal en un movimiento de rotación.
"Demostramos cómo se pueden utilizar patrones de movimiento autoorganizados para generar locomoción incorporada, "Dijo Sándor." El uso de este esquema de control puede ayudar a simplificar los cálculos complejos que deben realizarse para completar varias tareas de locomoción. Combinarlo con otros métodos puede conducir a herramientas poderosas para generar comportamientos robóticos complejos. Nuestro marco también podría contribuir a la comprensión de la locomoción animal y humana ".
El estudio realizado por Sándor, Gros y sus colegas podrían conducir a una nueva técnica para controlar de manera eficiente los movimientos de los robots. La ventaja práctica clave de su marco es que asigna parte de la carga computacional al cuerpo del robot. Su modelo también podría usarse para enseñar sistemas dinámicos en cursos de física de la escuela secundaria, ya que permite demostraciones interactivas y atractivas.
Los investigadores ahora planean probar sus algoritmos en arquitecturas robóticas más complejas, incorporando diferentes modalidades sensoriales en sus ecuaciones. Por ejemplo, podrían aplicar el control de patadas a una organización jerárquica de controladores, en el que la información visual activa un modo de locomoción particular.
"Actualmente estamos trabajando para generalizar nuestros principios a los robots con patas, en particular hexápodos, y nuestros primeros resultados son prometedores, ", Dijo Gros." También estamos investigando la activación del control de la patada mediante la información sensorial ".
© 2019 Science X Network