Jenga! #RoboFail. Crédito:Fazeli et al., Sci. Robot. 4, eaav3123 (2019)
En el sótano del Edificio 3 del MIT, un robot está contemplando cuidadosamente su próximo movimiento. Empuja suavemente una torre de bloques, buscando el mejor bloque para extraer sin derribar la torre, en un solitario, movimiento lento, pero sorprendentemente ágil juego de Jenga.
El robot, desarrollado por ingenieros del MIT, está equipado con una pinza de puntas blandas, una muñequera con sensor de fuerza, y una cámara externa, todo lo cual utiliza para ver y sentir la torre y sus bloques individuales.
Mientras el robot empuja con cuidado contra un bloque, una computadora recibe información visual y táctil de su cámara y brazalete, y compara estas medidas con los movimientos que hizo el robot anteriormente. También considera los resultados de esos movimientos, específicamente, si un bloque, en una determinada configuración y empujado con cierta fuerza, se extrajo con éxito o no. En tiempo real, el robot luego "aprende" si debe seguir empujando o moverse a un nuevo bloque, para evitar que la torre se caiga.
Los detalles del robot que juega Jenga se publican en la revista. Ciencia Robótica . Alberto Rodríguez, el Profesor Asistente de Desarrollo de Carrera Walter Henry Gale en el Departamento de Ingeniería Mecánica del MIT, dice que el robot demuestra algo que ha sido complicado de lograr en sistemas anteriores:la capacidad de aprender rápidamente la mejor manera de realizar una tarea, no solo por señales visuales, como se estudia comúnmente en la actualidad, pero también de táctil, interacciones físicas.
"A diferencia de las tareas o juegos más puramente cognitivos, como el ajedrez o el Go, jugar el juego de Jenga también requiere el dominio de habilidades físicas como sondear, emprendedor, tracción, colocación, y alineando piezas. Requiere percepción y manipulación interactivas, dónde tienes que ir y tocar la torre para aprender cómo y cuándo mover bloques, "Dice Rodríguez." Esto es muy difícil de simular, por lo que el robot tiene que aprender en el mundo real interactuando con la torre Jenga real. El desafío clave es aprender de un número relativamente pequeño de experimentos explotando el sentido común sobre los objetos y la física ".
Él dice que el sistema de aprendizaje táctil que los investigadores han desarrollado se puede utilizar en aplicaciones más allá de Jenga, especialmente en tareas que necesitan una cuidadosa interacción física, incluida la separación de objetos reciclables de la basura del vertedero y el ensamblaje de productos de consumo.
"En una línea de montaje de teléfonos móviles, en casi cada paso, la sensación de un ajuste a presión, o un tornillo roscado, viene de la fuerza y el tacto en lugar de la visión, ", Dice Rodríguez." Los modelos de aprendizaje para esas acciones es un terreno primordial para este tipo de tecnología ".
El autor principal del artículo es la estudiante graduada del MIT, Nima Fazeli. El equipo también incluye a Miquel Oller, Jiajun Wu, Zheng Wu, y Joshua Tenenbaum, profesor de ciencias cerebrales y cognitivas en el MIT.
Empujar y jalar
En el juego de Jenga, que en swahili significa "construir", se apilan 54 bloques rectangulares en 18 capas de tres bloques cada uno, con los bloques de cada capa orientados perpendicularmente a los bloques de abajo. El objetivo del juego es extraer con cuidado un bloque y colocarlo en la parte superior de la torre, construyendo así un nuevo nivel, sin derribar toda la estructura.
Para programar un robot para que juegue a Jenga, Los esquemas tradicionales de aprendizaje automático pueden requerir capturar todo lo que pueda suceder entre un bloque, el robot, y la torre, una tarea computacional costosa que requiere datos de miles, si no decenas de miles de intentos de extracción de bloques.
En lugar de, Rodríguez y sus colegas buscaron una forma más eficiente en cuanto a datos para que un robot aprendiera a jugar a Jenga, inspirado por la cognición humana y la forma en que nosotros mismos podríamos abordar el juego.
El equipo personalizó un brazo robótico ABB IRB 120 estándar de la industria, luego instale una torre Jenga al alcance del robot, y comenzó un período de entrenamiento en el que el robot primero eligió un bloque aleatorio y una ubicación en el bloque contra el cual empujar. Luego ejerció una pequeña cantidad de fuerza en un intento de empujar el bloque fuera de la torre.
Para cada intento de bloque, una computadora registró las mediciones visuales y de fuerza asociadas, y etiquetó si cada intento fue un éxito.
En lugar de llevar a cabo decenas de miles de intentos de este tipo (lo que implicaría reconstruir la torre casi la misma cantidad de veces), el robot entrenado en casi 300, con intentos de medidas y resultados similares agrupados en grupos que representan ciertos comportamientos en bloque. Por ejemplo, un grupo de podría representar intentos en un bloque que era difícil de mover, versus uno que era más fácil de mover, o que derribó la torre cuando se movió. Para cada grupo de datos, el robot desarrolló un modelo simple para predecir el comportamiento de un bloque dadas sus medidas visuales y táctiles actuales.
Fazeli dice que esta técnica de agrupamiento aumenta drásticamente la eficiencia con la que el robot puede aprender a jugar. y se inspira en la forma natural en que los humanos agrupan comportamientos similares:"El robot crea grupos y luego aprende modelos para cada uno de estos grupos, en lugar de aprender un modelo que capture absolutamente todo lo que podría suceder ".
Apilar
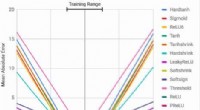
Los investigadores probaron su enfoque con otros algoritmos de aprendizaje automático de última generación, en una simulación por computadora del juego usando el simulador MuJoCo. Las lecciones aprendidas en el simulador informaron a los investigadores sobre la forma en que el robot aprendería en el mundo real.

Robot que juega a Jenga. Crédito:Fazeli et al., Sci. Robot. 4, eaav3123 (2019)
"Proporcionamos a estos algoritmos la misma información que obtiene nuestro sistema, para ver cómo aprenden a jugar Jenga a un nivel similar, "Dice Oller." En comparación con nuestro enfoque, estos algoritmos necesitan explorar órdenes de magnitud más torres para aprender el juego ".
Curioso por saber cómo su enfoque de aprendizaje automático se compara con los jugadores humanos reales, el equipo llevó a cabo algunas pruebas informales con varios voluntarios.
"Vimos cuántos bloques podía extraer un humano antes de que cayera la torre, y la diferencia no fue tanta, "Dice Oller.
Pero todavía hay un camino por recorrer si los investigadores quieren enfrentar competitivamente a su robot contra un jugador humano. Además de las interacciones físicas, Jenga requiere estrategia, como extraer solo el bloque correcto que dificultará que un oponente saque el siguiente bloque sin derribar la torre.
Por ahora, el equipo está menos interesado en desarrollar un campeón de Jenga robótico, y más centrado en aplicar las nuevas habilidades del robot a otros dominios de aplicación.
"Hay muchas tareas que hacemos con nuestras manos donde la sensación de hacerlo 'de la manera correcta' viene en el lenguaje de las fuerzas y las señales táctiles, "Dice Rodríguez." Para tareas como estas, un enfoque similar al nuestro podría resolverlo ".
Esta investigación fue apoyada, en parte, por la Fundación Nacional de Ciencias a través de la Iniciativa Nacional de Robótica.