Un equipo internacional de investigadores ha desarrollado un sistema de percepción para robots blandos inspirado en la forma en que los humanos procesan la información sobre sus propios cuerpos en el espacio y en relación con otros objetos y personas. Describen el sistema, que incluye un sistema de captura de movimiento, sensores suaves, una red neuronal, y un dedo robótico suave, en la edición del 30 de enero de Ciencia Robótica . Crédito:Universidad de California en San Diego
Un equipo internacional de investigadores ha desarrollado un sistema de percepción para robots blandos inspirado en la forma en que los humanos procesan la información sobre sus propios cuerpos en el espacio y en relación con otros objetos y personas. Describen el sistema, que incluye un sistema de captura de movimiento, sensores suaves, una red neuronal, y un dedo robótico suave, en la edición del 30 de enero de Ciencia Robótica .
El objetivo final de los investigadores es construir un sistema que pueda predecir los movimientos y el estado interno de un robot sin depender de sensores externos. al igual que los humanos todos los días. En su Ciencia Robótica papel, demuestran que han logrado este objetivo para un dedo robótico suave. El trabajo tiene aplicaciones en la interacción humano-robot y la robótica portátil, así como dispositivos blandos para corregir trastornos que afectan a músculos y huesos.
El sistema está diseñado para imitar los diversos componentes necesarios para que los humanos naveguen por su entorno:el sistema de captura de movimiento representa la visión; la red neuronal representa las funciones cerebrales; los sensores para el tacto; y el dedo del cuerpo interactuando con el mundo exterior. El sistema de captura de movimiento está ahí para entrenar la red neuronal y se puede descartar una vez que se completa el entrenamiento.
"Las ventajas de nuestro enfoque son la capacidad de predecir movimientos y fuerzas complejos que experimenta el robot blando (lo cual es difícil con los métodos tradicionales) y el hecho de que se puede aplicar a múltiples tipos de actuadores y sensores, "dijo Michael Tolley, profesor de ingeniería mecánica y aeroespacial en la Universidad de California en San Diego y autor principal del artículo. "Nuestro método también incluye sensores redundantes, lo que mejora la solidez general de nuestras predicciones ".

El dedo robótico suave proporciona información háptica y de movimiento al sistema. Crédito:Universidad de California en San Diego
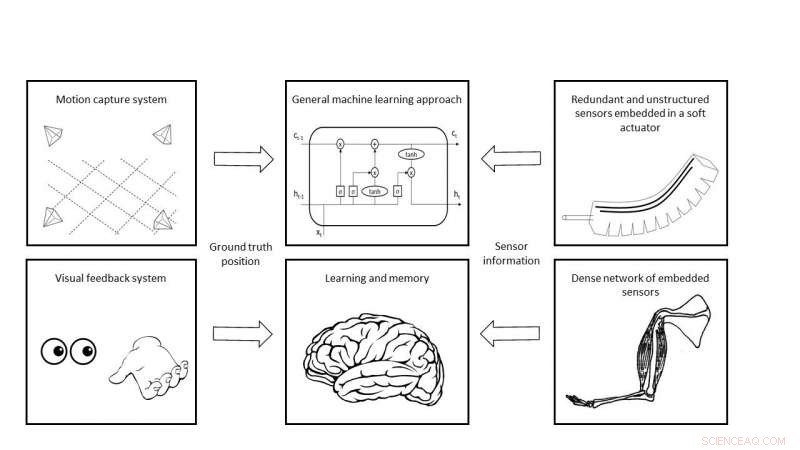
Descripción general de la arquitectura de modelado y su paralelo con el sistema perceptivo humano. Crédito:Universidad de California en San Diego
Los investigadores incorporaron sensores de tensión suave arbitrariamente dentro del dedo robótico suave, sabiendo que responderían a una amplia variedad de movimientos, y utilizó técnicas de aprendizaje automático para interpretar las señales de los sensores. Esto permitió al equipo, que incluye investigadores del Laboratorio de Diseño y Robótica Bioinspired en UC San Diego, para predecir las fuerzas aplicadas a, y movimientos de, el dedo. Este enfoque permitirá a los investigadores desarrollar modelos que puedan predecir las fuerzas y deformaciones que experimentan los sistemas robóticos blandos a medida que se mueven.
Esto es importante porque las técnicas tradicionalmente utilizadas en robótica para procesar datos de sensores no pueden capturar las complejas deformaciones de los sistemas blandos. Además, la información que capturan los sensores es igualmente compleja. Como resultado, diseño del sensor, La colocación y fabricación en robots blandos son tareas difíciles que podrían mejorarse enormemente si los investigadores tuvieran acceso a modelos robustos. Esto es lo que el equipo de investigación espera ofrecer.
Los siguientes pasos incluyen aumentar la cantidad de sensores para imitar mejor las capacidades de detección densa de la piel biológica y cerrar el ciclo para el control de retroalimentación del actuador.