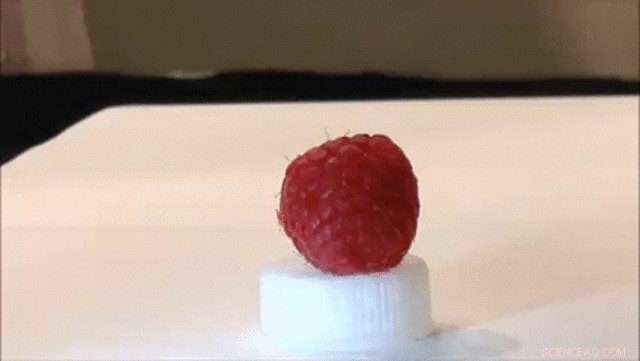
Los investigadores de Stanford desarrollaron el sensor similar a la piel en la punta del dedo de esta mano robótica, y lo programé para que toque la fruta sin dañarla. Un día esperan crear sistemas de control que permitan a un robot percibir las características de los objetos y calcular de forma autónoma cuánta fuerza aplicar. Crédito:el laboratorio de Bao
Los ingenieros de Stanford han desarrollado un guante electrónico que contiene sensores que algún día podrían dar a las manos robóticas el tipo de destreza que los humanos dan por sentado.
En un artículo publicado el 21 de noviembre en Ciencia Robótica , La ingeniera química Zhenan Bao y su equipo demostraron que los sensores funcionan lo suficientemente bien como para permitir que una mano robótica toque una delicada baya y maneje una pelota de ping-pong sin aplastarlos.
"Esta tecnología nos coloca en el camino de algún día dar a los robots el tipo de capacidades de detección que se encuentran en la piel humana, "Dijo Bao.
Bao dijo que los sensores en las yemas de los dedos del guante miden simultáneamente la intensidad y la dirección de la presión, dos cualidades esenciales para lograr la destreza manual. Los investigadores aún deben perfeccionar la tecnología para controlar automáticamente estos sensores, pero cuando lo hacen, un robot que lleva el guante podría tener la destreza de sostener un huevo entre el pulgar y el índice sin romperlo o dejar que se resbale.
Electrónica imitando la vida
El guante electrónico imita la forma en que las capas de la piel humana trabajan juntas para dar a nuestras manos su extraordinaria sensibilidad.
Nuestra capa exterior de piel está imbuida de sensores para detectar la presión, calor y otros estímulos. Nuestros dedos y palmas son particularmente ricos en sensores táctiles. Estos sensores funcionan junto con una subcapa de piel llamada espinoso, un terreno microscópico accidentado de colinas y valles.
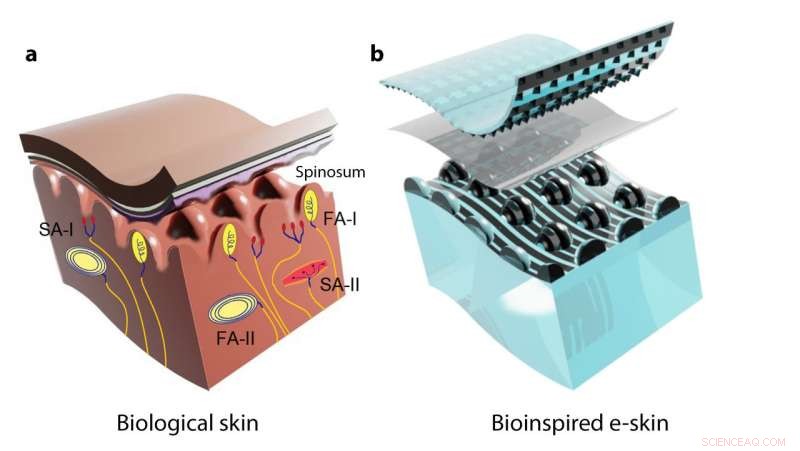
Una sección transversal de la piel humana de la yema del dedo que muestra las estructuras sensoriales clave (izquierda). Esta estructura sirvió de inspiración para el diseño del e-skin (derecha). Crédito:Boutry et al., Sci. Robot . 3, eaau6914 (2018)
Ese bache es crítico. Cuando nuestro dedo toca un objeto, la capa externa de piel se acerca al espinoso. Un toque ligero se siente principalmente por sensores cerca de las colinas. Una presión más intensa fuerza a la piel exterior hacia los valles del espinoso, desencadenando sensaciones táctiles más intensas.
Pero medir la intensidad de la presión es solo una parte de lo que permite el espinoso. Esta subcapa irregular también ayuda a revelar la dirección de la presión, o fuerza cortante. Un dedo presionando el norte, por ejemplo, crea fuertes señales en las laderas sur de esas microscópicas colinas. Esta capacidad de sentir la fuerza de corte es parte de lo que nos ayuda a sostener un huevo con suavidad pero firmeza entre el pulgar y el índice.
La erudita postdoctoral Clementine Boutry y el estudiante de maestría Marc Negre lideraron el desarrollo de los sensores electrónicos que imitan este mecanismo humano. Cada sensor en la punta del dedo del guante robótico está hecho de tres capas flexibles que funcionan en conjunto. Las capas superior e inferior son eléctricamente activas. Los investigadores colocaron una cuadrícula de líneas eléctricas en cada una de las dos superficies enfrentadas, como filas en un campo, y giró estas filas perpendiculares entre sí para crear una densa matriz de pequeños píxeles de detección. También hicieron que la capa inferior se llenara de baches como el espinoso.
El aislante de goma en el medio simplemente mantuvo separadas las capas superior e inferior de los electrodos. Pero esa separación fue fundamental, porque los electrodos que están cerca sin tocarse pueden almacenar energía eléctrica. Mientras el dedo robótico presionaba hacia abajo, apretando los electrodos superiores más cerca de la parte inferior, la energía almacenada aumentó. Las colinas y valles de la capa inferior proporcionaron una forma de mapear la intensidad y la dirección de la presión a puntos específicos en las cuadrículas perpendiculares, muy parecido a la piel humana.
Toque delicado
Para probar su tecnología, los investigadores colocaron sus sensores de tres capas en los dedos de un guante de goma, y poner el guante en una mano robótica. Eventualmente, el objetivo es incrustar sensores directamente en una cubierta similar a una piel para manos robóticas. En un experimento, programaron la mano robótica con guantes para tocar suavemente una baya sin dañarla. También programaron la mano enguantada para levantar y mover una pelota de ping-pong sin aplastarla. utilizando el sensor para detectar la fuerza de corte adecuada para agarrar la bola sin dejarla caer.
Bao dijo que con la programación adecuada, una mano robótica con el guante sensor táctil actual podría realizar una tarea repetitiva, como levantar huevos de una cinta transportadora y colocarlos en cajas de cartón. La tecnología también podría tener aplicaciones en cirugía asistida por robot, donde el control táctil preciso es esencial. Pero el objetivo final de Bao es desarrollar una versión avanzada del guante que aplique automáticamente la cantidad justa de fuerza para manipular un objeto de forma segura sin programación previa.
"Podemos programar una mano robótica para que toque una frambuesa sin aplastarla, pero estamos muy lejos de poder tocar y detectar que es frambuesa y permitir que el robot lo recoja, " ella dijo.