Crédito:Instituto de Tecnología de Massachusetts
El robot Cheetah 3 del MIT ahora puede saltar y galopar por terreno accidentado, sube una escalera llena de escombros, y recupera rápidamente su equilibrio cuando de repente se tira o empuja, todo mientras es esencialmente ciego.
La bestia mecánica de 90 libras, aproximadamente del tamaño de un Labrador adulto, está diseñada intencionalmente para hacer todo esto sin depender de cámaras o sensores ambientales externos. En lugar de, ágilmente "siente" su camino a través de su entorno de una manera que los ingenieros describen como "locomoción ciega, "muy parecido a abrirse camino a través de una habitación a oscuras.
"Hay muchos comportamientos inesperados que el robot debería poder manejar sin depender demasiado de la visión, "dice el diseñador del robot, Sangbae Kim, profesor asociado de ingeniería mecánica en el MIT. "La visión puede ser ruidosa, ligeramente inexacto, y a veces no disponible, y si confías demasiado en la visión, su robot tiene que ser muy preciso en su posición y eventualmente será lento. Por eso queremos que el robot confíe más en la información táctil. De esa manera, puede manejar obstáculos inesperados mientras se mueve rápido ".
Los investigadores presentarán las capacidades sin visión del robot en octubre en la Conferencia Internacional sobre Robots Inteligentes, en Madrid. Además de la locomoción ciega, el equipo demostrará el hardware mejorado del robot, incluyendo un rango de movimiento ampliado en comparación con su predecesor Cheetah 2, que permite que el robot se estire hacia adelante y hacia atrás, y girar de lado a lado, muy parecido a un gato que se prepara para saltar.
En los próximos años, Kim imagina que el robot llevará a cabo tareas que de otro modo serían demasiado peligrosas o inaccesibles para que las realicen los humanos.
"Cheetah 3 está diseñado para realizar tareas versátiles como la inspección de centrales eléctricas, que implica diversas condiciones del terreno, incluidas escaleras, bordillos y obstáculos en el suelo, "Dice Kim." Creo que hay innumerables ocasiones en las que [querríamos] enviar robots para realizar tareas simples en lugar de humanos. Peligroso, sucio, y el trabajo difícil se puede realizar de forma mucho más segura mediante robots controlados a distancia ".
Hacer un compromiso
El Cheetah 3 puede subir ciegamente escaleras y atravesar terrenos no estructurados, y puede recuperar rápidamente su equilibrio frente a fuerzas inesperadas, gracias a dos nuevos algoritmos desarrollados por el equipo de Kim:un algoritmo de detección de contactos, y un algoritmo de control predictivo de modelos.
El algoritmo de detección de contacto ayuda al robot a determinar el mejor momento para que una pierna determinada cambie de balancearse en el aire a pisar el suelo. Por ejemplo, si el robot pisa una ramita ligera frente a una dura, rock pesado, cómo reacciona y si continúa avanzando con un paso, o tira hacia atrás y balancea la pierna en su lugar, puede hacer o deshacer su equilibrio.
"Cuando se trata de cambiar del aire al suelo, el cambio tiene que estar muy bien hecho, "Dice Kim." Este algoritmo se trata realmente de '¿Cuándo es un momento seguro para seguir mis pasos?' "
El algoritmo de detección de contacto ayuda al robot a determinar el mejor momento para hacer la transición de una pierna entre balanceo y paso. calculando constantemente para cada pierna tres probabilidades:la probabilidad de que una pierna haga contacto con el suelo, la probabilidad de la fuerza generada una vez que la pierna golpea el suelo, y la probabilidad de que la pierna esté en medio de un swing. El algoritmo calcula estas probabilidades basándose en datos de giroscopios, acelerómetros, y posiciones articulares de las piernas, que registran el ángulo y la altura de la pierna con respecto al suelo.
Si, por ejemplo, el robot pisa inesperadamente un bloque de madera, su cuerpo se inclinará de repente, cambiando el ángulo y la altura del robot. Esos datos se incorporarán inmediatamente al cálculo de las tres probabilidades para cada tramo, que el algoritmo combinará para estimar si cada pierna debe comprometerse a empujar hacia abajo en el suelo, o levántese y gírelo para mantener el equilibrio, todo mientras el robot está prácticamente ciego.

El robot Cheetah 3 del MIT puede subir escaleras y superar obstáculos sin la ayuda de cámaras o sensores visuales. Crédito:Instituto de Tecnología de Massachusetts
"Si los humanos cerramos los ojos y damos un paso, tenemos un modelo mental de dónde podría estar el suelo, y puede prepararse para ello. Pero también confiamos en la sensación de tocar el suelo, ", Dice Kim." Estamos haciendo lo mismo al combinar múltiples [fuentes de] información para determinar el tiempo de transición ".
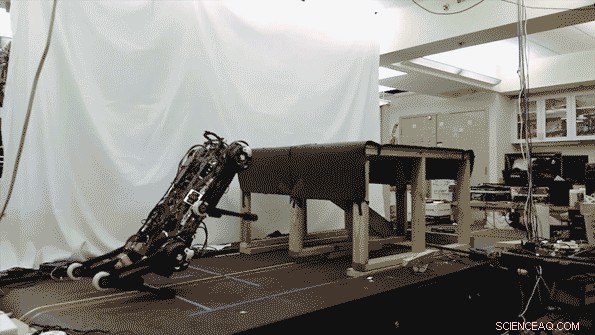
Los investigadores probaron el algoritmo en experimentos con el Cheetah 3 trotando en una caminadora de laboratorio y subiendo una escalera. Ambas superficies estaban cubiertas de objetos aleatorios, como bloques de madera y rollos de cinta.
"No conoce la altura de cada paso, y no sabe que hay obstáculos en las escaleras, pero simplemente se abre paso sin perder el equilibrio, "Dice Kim". Sin ese algoritmo, el robot era muy inestable y se caía fácilmente ".
Fuerza futura
La locomoción ciega del robot también se debió en parte al algoritmo de control predictivo del modelo, que predice cuánta fuerza debe aplicar una pierna determinada una vez que se ha comprometido a dar un paso.
"El algoritmo de detección de contactos te dirá, 'este es el momento de aplicar fuerzas en el suelo, ", Dice Kim." Pero una vez que estás en el suelo, ahora necesita calcular qué tipo de fuerzas aplicar para poder mover el cuerpo de la manera correcta ".
El algoritmo de control predictivo del modelo calcula las posiciones multiplicativas del cuerpo y las piernas del robot medio segundo en el futuro, si una pierna determinada aplica cierta fuerza al hacer contacto con el suelo.
"Digamos que alguien patea al robot de lado, "Dice Kim." Cuando el pie ya está en el suelo, el algoritmo decide, '¿Cómo debo especificar las fuerzas en el pie? Porque tengo una velocidad indeseable a la izquierda, así que quiero aplicar una fuerza en la dirección opuesta para matar esa velocidad. Si aplico 100 newtons en esta dirección opuesta, ¿Qué pasará medio segundo después? "
El algoritmo está diseñado para realizar estos cálculos para cada tramo cada 50 milisegundos, o 20 veces por segundo. En experimentos, Los investigadores introdujeron fuerzas inesperadas pateando y empujando al robot mientras trotaba en una cinta de correr, y tirándolo de la correa mientras subía una escalera llena de obstáculos. Descubrieron que el algoritmo de predicción del modelo permitía al robot producir rápidamente contrafuerzas para recuperar el equilibrio y seguir avanzando. sin inclinar demasiado en la dirección opuesta.
"Es gracias a ese control predictivo que puede aplicar las fuerzas adecuadas en el suelo, combinado con este algoritmo de transición de contacto que hace que cada contacto sea muy rápido y seguro, "Dice Kim.
El equipo ya había agregado cámaras al robot para darle retroalimentación visual de su entorno. Esto ayudará a mapear el entorno general, y le dará al robot un aviso visual sobre obstáculos más grandes, como puertas y paredes. Pero por ahora, el equipo está trabajando para mejorar aún más la locomoción ciega del robot
"Queremos un controlador muy bueno sin visión primero, "Dice Kim". Y cuando agregamos visión, incluso si puede proporcionarle información incorrecta, la pierna debe poder manejar (obstáculos). Porque, ¿y si pisa algo que una cámara no puede ver? ¿Qué hará? Ahí es donde la locomoción ciega puede ayudar. No queremos confiar demasiado en nuestra visión ".
Esta historia se vuelve a publicar por cortesía de MIT News (web.mit.edu/newsoffice/), un sitio popular que cubre noticias sobre la investigación del MIT, innovación y docencia.