La pinza también puede objetos porosos, como esta roca. Crédito:JPL
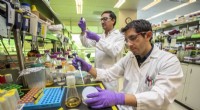
Un equipo de investigadores de California ha desarrollado una pinza robótica que combina las propiedades adhesivas de los dedos de los pies de gecko y la adaptabilidad de los robots blandos impulsados por aire para agarrar una variedad de objetos mucho más amplia que la del estado de la técnica.
Los investigadores presentarán sus hallazgos en la Conferencia Internacional de Robótica y Automatización de 2018 del 21 al 25 de mayo en Brisbane, Australia. La pinza puede levantar hasta 45 libras. y podría usarse para agarrar objetos en una amplia gama de entornos, desde los pisos de las fábricas hasta la Estación Espacial Internacional.
Los geckos son conocidos como los mejores escaladores de la naturaleza debido a un sofisticado mecanismo de agarre en los dedos de los pies. En trabajos anteriores, Investigadores de la Universidad de Stanford y el Laboratorio de Propulsión a Chorro recrearon ese mecanismo con un material sintético llamado adhesivo inspirado en lagartijas. Este material se utilizó principalmente en superficies planas como paredes. En el trabajo actual, los investigadores unieron fuerzas con los ingenieros de la Universidad de California en San Diego. El equipo cubrió los dedos de una pinza robótica suave con el adhesivo gecko, lo que le permite agarrar con más firmeza una amplia gama de objetos, incluyendo pipas y tazas, sin dejar de ser capaz de manejar objetos ásperos como rocas. La pinza también puede agarrar objetos en varias posiciones, por ejemplo, agarrar una taza en muchos ángulos diferentes.
Los investigadores demostraron que la pinza podía agarrar y manipular objetos porosos y sucios, como las rocas volcánicas, una tarea que suele ser un desafío para los adhesivos de gecko. También fue capaz de recoger piezas grandes Tubería cilíndrica:una tarea que suele ser difícil para las pinzas robóticas blandas.
"Nos dimos cuenta de que estos dos componentes, robótica blanda y adhesivos gecko, se complementan muy bien, "dijo Paul Glick, primer autor del artículo y un Ph.D. estudiante en el Laboratorio de Diseño y Robótica Bioinspired en la Escuela de Ingeniería Jacobs en UC San Diego.
El gecko es uno de los mejores escaladores de la naturaleza, gracias a millones de pelos microscópicos, con características de 20 a 30 veces más pequeñas que un cabello humano, que le permiten trepar sobre prácticamente cualquier superficie. Los pelos terminan en pequeñas nanoestructuras que interactúan a nivel atómico con moléculas en la superficie que el gecko está tratando de agarrar. Esta interacción, impulsado por lo que se llama fuerzas de van der Waals, hace que los dedos de los pies del gecko se adhieran y se desprendan fácilmente según sea necesario. Los investigadores de JPL utilizan materiales sintéticos y conjuntos similares de características microscópicas para aprovechar el poder de las fuerzas de van der Waals y demostraron que estos adhesivos retuvieron muchas de las mismas propiedades que los dedos de los pies de los animales que los inspiraron.
Debido a que los adhesivos gecko funcionan mediante interacciones moleculares entre superficies, funcionan mejor cuando tienen una gran superficie de contacto. Recubrir el interior de los dedos robóticos blandos con estos adhesivos maximiza la cantidad de área de superficie con la que hacen contacto, asegurando un mejor agarre.
El equipo de ingeniería resuelve dos problemas diferentes en este artículo.

Los investigadores montaron una versión ligeramente modificada de la pinza en un brazo robótico en JPL. Demostraron que es capaz de levantar hasta 45 libras. Crédito:JPL
Primero, Los investigadores de UC San Diego se propusieron asegurarse de que los dedos de la pinza mantuvieran un contacto constante con la superficie de cualquier objeto. Un problema común con los dedos blandos impulsados por aire es que tienden a abultarse en el medio cuando se inflan. reduciendo este contacto superficial.
Glick encontró un estudio de la década de 1970 que proporcionó las ecuaciones necesarias para resolver el problema en el proceso de diseño. Esto permitió a los investigadores hacer que la pinza aplicara las fuerzas correctas a lo largo de toda la longitud de los dedos.
En segundo lugar, los investigadores se centraron en distribuir fuerzas en superficies que no son planas para optimizar el rendimiento de los adhesivos inspirados en gecko. Los investigadores encontraron una forma de distribuir la fuerza a lo largo de un pinza flexible, manteniendo la precisión de fabricación requerida para los adhesivos.
El equipo hizo esto usando una tela de alta resistencia incrustada en el dedo que se puede doblar fácilmente pero resiste el estiramiento para soportar cargas más grandes. Los dedos se sujetan rígidamente a una base, que evita que la silicona fácilmente estirable se deforme más allá de lo necesario. Esta combinación de materiales blandos y rígidos permite que la pinza se adapte a muchos objetos y resista grandes fuerzas.

La pinza puede manipular fácilmente objetos como tazas. Crédito:Universidad de California en San Diego y JPL
Los adhesivos gecko en sí se fabrican en un proceso de tres pasos. Un molde adhesivo maestro gecko original con millones de estructuras microscópicas se fabrica en una sala limpia mediante un proceso de fotolitografía. Luego, Se pueden hacer copias de cera del molde maestro a bajo costo. Luego, los investigadores pueden hacer tantas copias de las láminas adhesivas del molde de cera como deseen mediante un proceso llamado recubrimiento por rotación. Esto les permite hacer de 10 a 20 hojas adhesivas en menos de una hora. Mientras tanto, la pinza robótica blanda en sí está moldeada en moldes de impresión 3D y está hecha de caucho a base de silicona.
Los próximos pasos en la investigación incluyen el desarrollo de algoritmos para agarrar que aprovechan los adhesivos, e investigando el uso de esta pinza para operaciones espaciales y de gravedad cero.