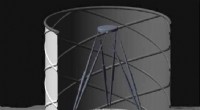
El rover Curiosity Mars de la NASA realizó una prueba el 17 de octubre, 2017, como parte del desarrollo del equipo rover de una nueva forma de utilizar el taladro del rover. Crédito:NASA / JPL-Caltech
El equipo Curiosity del rover de la NASA en Marte está trabajando para restaurar la capacidad de perforación de muestras del Curiosity utilizando nuevas técnicas. El último desarrollo es una prueba preparatoria en Marte.
La misión de cinco años aún está a varios meses de la reanudación más rápida posible de la perforación en rocas marcianas. Los gerentes están entusiasmados con las pruebas exitosas de técnicas realizadas en la Tierra para solucionar un problema mecánico que apareció a fines del año pasado y que suspendió el uso del taladro del rover.
"Estamos procediendo de manera constante con la debida precaución para desarrollar y probar formas de usar el rover de manera diferente a como nunca antes, y Curiosity continúa con investigaciones productivas que no requieren perforación, "dijo el subdirector de proyectos Steve Lee, del Laboratorio de Propulsión a Chorro de la NASA, Pasadena, California.
Curiosity tocó el suelo con su taladro el 17 de octubre por primera vez en 10 meses. Presionó la broca hacia abajo, y luego aplicó fuerzas laterales más pequeñas mientras tomaba medidas con un sensor de fuerza.
"Esta es la primera vez que colocamos la broca directamente sobre una roca marciana sin estabilizadores, "dijo Douglas Klein de JPL, ingeniero jefe para el desarrollo de retorno a la perforación de la misión. "La prueba es para comprender mejor cómo el sensor de fuerza / torsión en el brazo proporciona información sobre las fuerzas laterales".
Este sensor le da al brazo una sensación de tacto sobre la fuerza con la que está presionando hacia abajo o hacia los lados. Evitar demasiada fuerza lateral al perforar una roca y extraer la broca de la roca es crucial para evitar que la broca se atasque en la roca.
Curiosity ha utilizado su taladro para adquirir material de muestra de rocas marcianas 15 veces hasta ahora, de 2013 a 2016. Recolectó muestras de roca en polvo que se entregaron a los instrumentos de laboratorio dentro del rover. En cada una de esas ocasiones, dos postes de contacto, los estabilizadores a cada lado de la barrena, se colocaron en la roca objetivo mientras la barrena estaba en una posición retirada. Luego, un mecanismo de alimentación motorizado dentro del taladro extendió la broca hacia adelante, y las acciones de rotación y percusión de la broca penetraron en la roca.
El mecanismo de alimentación del taladro dejó de funcionar de manera confiable en diciembre de 2016. Después de explorar las posibilidades de restaurar la confiabilidad del mecanismo de alimentación o usarlo a pesar de la falta de confiabilidad, el proyecto estableció una prioridad para desarrollar un método alternativo de perforación sin el uso del mecanismo de alimentación. La alternativa prometedora utiliza el movimiento del brazo robótico para hacer avanzar directamente la broca extendida hacia una roca.
"Estamos reemplazando el movimiento de un eje del mecanismo de alimentación por un brazo que tiene cinco grados de libertad de movimiento, "Dijo Klein." Eso no es simple. Es una suerte que el brazo tenga el sensor de fuerza / torsión ".
El uso principal del sensor hasta ahora ha sido monitorear una fuerza tan excesiva de las expectativas que detendría automáticamente todos los movimientos del brazo durante el día. La nueva perforación de "avance extendido" la utiliza para compensar las cargas laterales. Esta prueba ayudará a los ingenieros a determinar cómo se pueden utilizar los datos del sensor de manera más eficaz.
Usando este método, un casi gemelo de Curiosity en JPL ha recolectado muestras perforadas de rocas terrestres. El equipo también ha desarrollado métodos para entregar muestras perforadas a las entradas de instrumentos de laboratorio en la plataforma del vehículo de prueba sin el uso del mecanismo de alimentación del taladro. Es necesario el desarrollo de esta técnica alternativa de transferencia de muestras porque el proceso utilizado anteriormente dependía de tener la broca en una posición extraída, en lugar de extendido, posición.
"El trabajo de desarrollo y las pruebas aquí en JPL han sido prometedores, "Dijo Lee." El siguiente paso es evaluar el sensor de fuerza / torsión en Marte. Hemos logrado un gran progreso en el desarrollo de la perforación con alimentación extendida, utilizando las capacidades versátiles del rover más allá de los conceptos de diseño originales. Si bien todavía existen incertidumbres que pueden complicar los intentos de perforar nuevamente en Marte, somos optimistas ".
La ubicación actual del rover está en "Vera Rubin Ridge" en la parte inferior del Monte Sharp. La curiosidad se acerca a la cima de la cresta de 20 pisos de altura. Se ha estado estudiando la extensión y distribución del mineral de óxido de hierro hematita en las rocas que forman la cresta resistente a la erosión.