Robot ASIMO de Honda. Ver más imagenes de robots . Foto cortesía de Honda Motor Co., Limitado.
Robot ASIMO de Honda. Ver más imagenes de robots . Foto cortesía de Honda Motor Co., Limitado. ¿Quieres un robot para cocinar tu cena? Haz tu tarea, limpia tu casa, u obtener sus comestibles? Los robots ya hacen muchos de los trabajos que los humanos no queremos hacer, no puedo hacer o simplemente no puede hacerlo tan bien como nuestros homólogos robóticos. En fábricas de todo el mundo, brazos robóticos incorpóreos ensamblan coches, coloque delicadamente los dulces en sus cajas, y hacer todo tipo de trabajos tediosos. Incluso hay un puñado de robots en el mercado cuyo único trabajo es aspirar el piso o cortar el césped.
Galería de imágenes de robots
Muchos de nosotros crecimos viendo robots en la televisión y en las películas:estaba Rosie, el robot ama de llaves de los Supersónicos; Datos, el miembro de la tripulación androide de "Star Trek:The Next Generation"; y por supuesto, C3PO de "Star Wars". Los robots que se están creando hoy no pertenecen al ámbito de los datos o C3PO, pero ha habido algunos avances asombrosos en su tecnología. Los ingenieros de Honda han estado ocupados creando el ASIMO robot por más de 20 años . En este articulo, Descubriremos qué hace que ASIMO sea el robot humanoide más avanzado hasta la fecha.
Honda Motor Company desarrolló ASIMO, Lo que significa Paso avanzado en movilidad innovadora , y es el robot humanoide más avanzado del mundo. Según el sitio web de ASIMO, ASIMO es el primer robot humanoide del mundo que puede caminar de forma independiente y subir escaleras .
Además de la capacidad de ASIMO para caminar como nosotros, también puede comprender gestos preprogramados y comandos hablados , reconocer voces y rostros y interfaz con tarjetas de comunicación IC . ASIMO tiene brazos y manos, por lo que puede hacer cosas como encender interruptores de luz, puertas abiertas, llevar objetos, y carros de empuje.
En lugar de construir un robot que sería otro juguete, Honda quería crear un robot que fuera un ayudante para las personas:un robot para ayudar en la casa, ayudar a los ancianos, o ayudar a alguien confinado a una silla de ruedas o una cama. ASIMO mide 4 pies 3 pulgadas (1,3 metros) de alto, que es la altura justa para mirar cara a cara con alguien sentado en una silla. Esto le permite a ASIMO hacer los trabajos para los que fue creado sin ser demasiado grande y amenazante. A menudo se le conoce como "un niño con traje espacial, "La apariencia amigable de ASIMO y su tamaño no amenazante funcionan bien para los propósitos que Honda tenía en mente al crearlo.
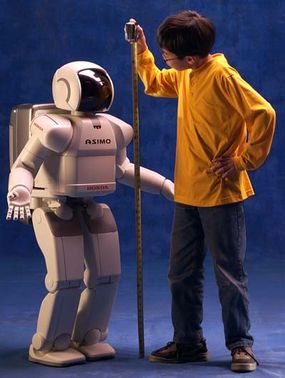 ASIMO mide solo 4 pies y 3 pulgadas de alto Foto cortesía de Honda Motor Co., Limitado.
ASIMO mide solo 4 pies y 3 pulgadas de alto Foto cortesía de Honda Motor Co., Limitado. ASIMO también podría realizar trabajos que son demasiado peligroso para que lo hagan los humanos, como entrar en áreas peligrosas, bombas de desarme, o combatir incendios.
No puedo ser demasiado cuidadosoSe ha informado que debido a que la caminata de ASIMO es tan inquietantemente parecida a la humana, Los ingenieros de Honda se sintieron obligados a visitar el Vaticano solo para asegurarse de que estaba bien construir una máquina que se pareciera tanto a un humano. (El Vaticano pensó que estaba bien).
Contenido
 La fisiología de ASIMO está desarrollada para imitar la fisiología humana. Foto cortesía de Honda Motor Co., Limitado.
La fisiología de ASIMO está desarrollada para imitar la fisiología humana. Foto cortesía de Honda Motor Co., Limitado. Los investigadores de Honda comenzaron por estudiar las patas de los insectos, mamíferos, y el movimiento de un alpinista con piernas ortopédicas para comprender mejor la fisiología y todas las cosas que suceden cuando caminamos, especialmente en las articulaciones. Por ejemplo, el hecho de que nosotros cambiar nuestro peso usar nuestros cuerpos y especialmente nuestros brazos para mantener el equilibrio fue muy importante para lograr que el mecanismo de caminar de ASIMO fuera correcto. El hecho de que tenemos dedos de los pies Esa ayuda con nuestro equilibrio también se tuvo en cuenta:ASIMO en realidad tiene proyecciones suaves en sus pies que juegan un papel similar al que juegan nuestros dedos cuando caminamos. Este material blando también absorbe el impacto en las articulaciones, tal como lo hacen nuestros tejidos blandos cuando caminamos.
ASIMO tiene cadera, rodilla, y articulaciones del pie . Los robots tienen articulaciones que los investigadores denominan " grados de libertad . "Un solo grado de libertad permite el movimiento hacia la derecha y hacia la izquierda o hacia arriba y hacia abajo. ASIMO ha 34 grados de libertad repartidos por diferentes puntos de su cuerpo para permitirle moverse libremente. Hay tres grados de libertad en el cuello de ASIMO, siete en cada brazo y seis en cada pierna. El número de grados de libertad necesarios para las piernas de ASIMO se decidió midiendo el movimiento de la articulación humana mientras caminaba sobre un terreno plano. subir escaleras y correr.
ASIMO también tiene un sensor de velocidad y un giroscopio sensor montado en su cuerpo. Realizan las tareas de:
Estos sensores funcionan de manera similar a nuestros oídos internos en la forma en que mantienen el equilibrio y la orientación.
ASIMO también tiene sensores de superficie del suelo en sus pies y seis sensores ultrasónicos en su sección media. Estos sensores mejoran la capacidad de ASIMO para interactuar con su entorno al detectar objetos alrededor de ASIMO y comparar la información recopilada con mapas del área almacenada en la memoria de ASIMO.
Para realizar el trabajo que hacen nuestros músculos y piel al detectar la fuerza muscular, presión y ángulos articulares, ASIMO tiene ambos sensores de ángulo de articulación y un sensor de fuerza de seis ejes .
 Foto cortesía de Honda Motor Co., Limitado.
Foto cortesía de Honda Motor Co., Limitado. A menos que sepa mucho sobre robótica, es posible que no comprenda completamente el increíble hito que es que ASIMO camina como nosotros. La parte más significativa de la caminata de ASIMO es la capacidades de giro . En lugar de tener que parar y arrastrar los pies, parar y barajar, y deténgase y camine en una nueva dirección, ASIMO se inclina y gira suavemente como un humano. ASIMO también puede autoajustar sus pasos en caso de que tropiece, es empujado, o encuentra algo que altera la marcha normal.
Para lograr esto, Los ingenieros de ASIMO tuvieron que encontrar una manera de trabajar con el fuerzas de inercia creado al caminar. Por ejemplo, la gravedad de la tierra crea una fuerza, al igual que la velocidad a la que camina. Esas dos fuerzas se denominan "fuerza de inercia total". También existe la fuerza creada cuando tu pie se conecta con el suelo, llamada la "fuerza de reacción del suelo". Estas fuerzas tienen que equilibrarse y la postura tiene que funcionar para que esto suceda. Esto se llama " punto de momento cero "(ZMP).
Para controlar la postura de ASIMO, Los ingenieros trabajaron en tres áreas de control:
Aunque ASIMO no está del todo listo para el horario estelar (todavía hay mejoras que deben realizarse para permitir que funcione completamente como Honda espera), Honda ha puesto a ASIMO a trabajar como recepcionista en su oficina de Wako en la prefectura de Saitama, justo al norte de Tokio. ASIMO dedica su tiempo a saludar a los huéspedes y guiarlos por las instalaciones.
Para realizar estas funciones, ASIMO tiene que estar especialmente programado para conocer la distribución de los edificios y la forma adecuada de saludar a los visitantes y responder preguntas.
Si la idea de un ejército de robots ASIMO te da escalofríos, puedes relajarte. Honda dice que ASIMO nunca se utilizará en aplicaciones militares.
Lee mas

ASIMO puede detectar movimientos de caída y reaccionar a ellos rápidamente; pero los ingenieros de ASIMO querían más. Querían que el robot tuviera un paso suave así como hacer algo que otros robots no pueden hacer - girar sin parar .

Cuando caminamos por las esquinas cambiamos nuestro centro de gravedad en la curva. ASIMO utiliza una tecnología llamada " control de movimiento predictivo , "también llamada Tecnología inteligente para caminar flexible en tiempo real de Honda o I-Walk, para lograr lo mismo. ASIMO predice cuánto debe desplazar su centro de gravedad hacia el interior del giro y cuánto tiempo debe mantenerse ese cambio. Porque esta tecnología funciona en tiempo real , ASIMO puede hacer esto sin detenerse entre pasos, que deben hacer otros robots.
Esencialmente, con cada paso que da ASIMO, tiene que determinar su inercia y luego predecir cómo se debe cambiar su peso para el siguiente paso para caminar y girar suavemente. Ajusta cualquiera de los siguientes factores para mantener la posición correcta:
Si bien reproducir una caminata similar a la humana es un logro asombroso, ASIMO ahora puede correr a velocidades de hasta 3.7 millas por hora (6 kilómetros por hora). Para calificar como un verdadero robot corriendo, ASIMO debe tener ambos pies del suelo por un instante en cada paso. ASIMO se las arregla para estar en el aire durante .08 segundos con cada paso mientras corre.
Los ingenieros de Honda se encontraron con una serie de desafíos completamente nuevos al tratar de darle a ASIMO la capacidad de correr. Le dieron al torso de ASIMO un grado de libertad para ayudar a doblarse y girar para que el robot pudiera ajustar su postura mientras estaba en el aire. Sin esta habilidad, ASIMO perdería el control mientras estaba en el aire, posiblemente girando en el aire o tropezando al aterrizar.
Para hacer giros sin problemas mientras corre, los ingenieros mejoraron la capacidad de ASIMO para inclinar su centro de gravedad dentro de los giros para mantener el equilibrio y contrarrestar la fuerza centrífuga. ASIMO incluso podría anticipar los giros y comenzar a inclinarse hacia ellos antes de comenzar el giro, como lo haría si estuviera esquiando o patinando.
En la siguiente sección, veremos cómo ASIMO es capaz de reconocer imágenes y sentir su entorno.
 Foto cortesía de Honda Motor Co., Limitado.
Foto cortesía de Honda Motor Co., Limitado. En robótica, La visión es una imagen capturada que se interpreta en función de programas plantillas . En un entorno de fabricación, donde brazos robóticos construyen automóviles o robots inspeccionan las conexiones microscópicas en chips semiconductores, se trata de un entorno controlado. La iluminación es siempre la misma el ángulo es siempre el mismo, y hay un número limitado de cosas para mirar y comprender. En el mundo real (y no estructurado), sin embargo, el número de cosas para mirar y comprender aumenta enormemente.
Un robot humanoide que debe navegar por las casas. edificios o al aire libre mientras realiza trabajos debe ser capaz de dar sentido a los muchos objetos que "ve". Oscuridad, los ángulos y el movimiento extraños deben ser comprensibles. Por ejemplo, caminar por su cuenta en un área desconocida, un robot tendría que detectar y reconocer objetos en tiempo real, seleccionar características como el color, forma y bordes para compararlos con una base de datos de objetos o entornos que conoce. Puede haber miles de objetos en la "memoria" del robot.
El sistema de visión de ASIMO consta de dos cámaras de vídeo para ojos, ubicado en su cabeza. Usos de ASIMO visión estereoscópica y un propietario algoritmo de visión que deja ver, reconocer, y evitar toparse con objetos incluso si su orientación e iluminación no son las mismas que las de su base de datos de memoria. Estas cámaras pueden detectar múltiples objetos, determinar la distancia, percibir el movimiento, reconocer rostros programados e incluso interpretar los movimientos de las manos. Por ejemplo, cuando levanta la mano hacia ASIMO en una posición de "parada", ASIMO se detiene. La función de reconocimiento facial permite a ASIMO saludar a personas "familiares".
ASIMO puede reconocer objetos en movimiento interpretando las imágenes capturadas por las cámaras en su cabeza. Puede evaluar la distancia y la dirección de un objeto en movimiento, que permite a ASIMO seguir a una persona, detener su propio progreso para permitir que un objeto en movimiento se cruce en su camino, o saludarte cuando te acerques.
Las cámaras también transmiten lo que ASIMO ve al controlador de ASIMO. De esa manera, si está controlando ASIMO desde una PC, puedes ver lo que ve ASIMO.
Además de las cámaras en su cabeza, ASIMO tiene varios sensores que lo ayudan a maniobrar a través de entornos e interactuar con objetos y personas. Los sensores de superficie del suelo permiten a ASIMO detectar objetos y cambios en el suelo. Los sensores ultrasónicos ayudan a orientar ASIMO al detectar objetos circundantes. Los sensores ayudan a ASIMO a resolver las discrepancias entre el mapa interno del área preprogramado en su memoria y el entorno real.
ASIMO incluso tiene sentido del tacto, en cierto sentido. Los sensores de fuerza en las muñecas de ASIMO le permiten a ASIMO juzgar cuánta fuerza usar al levantar una bandeja, entregándole un archivo o estrechándole la mano. ASIMO puede integrar la información recopilada por sus cámaras y obligar a los sensores a moverse en sincronía con una persona mientras se toma de la mano. Al empujar un carro, Los sensores de fuerza de ASIMO ayudan al robot a ajustar la cantidad de fuerza necesaria para empujar el carro (por ejemplo, ASIMO puede empujar un carro con más fuerza si los sensores detectan una inclinación).
Otra forma en que ASIMO puede detectar el entorno es mediante el uso de tarjetas de comunicación IC. Las tarjetas IC utilizan señales infrarrojas para recibir y transmitir información. Si tiene una tarjeta IC con su información codificada, ASIMO puede detectar su presencia incluso si no está dentro de la línea de visión de sus cámaras. Estas tarjetas mejoran la capacidad de ASIMO para interactuar con otros. Por ejemplo, Si visita la oficina de Honda y recibe una tarjeta IC como pase de visitante, ASIMO podría saludarlo y dirigirlo a la habitación correcta después de leer electrónicamente la información codificada en su tarjeta.
Préstame tus micrófonosHay tres micrófonos ubicados en la cabeza de ASIMO. Usando estos micrófonos, ASIMO puede recibir comandos de voz y detectar la dirección del sonido. ASIMO puede determinar la ubicación de donde proviene el sonido y luego girar para mirar en esa dirección.
ASIMO no es un robot autónomo. No puede entrar en una habitación y tomar decisiones por sí solo sobre cómo navegar. ASIMO tiene que ser programado para hacer un trabajo específico en un área específica que tiene marcadores que comprende, o tiene que ser controlado manualmente por un humano.
ASIMO se puede controlar mediante cuatro métodos:
Usando tecnología inalámbrica 802.11 y una computadora portátil o de escritorio, puede controlar ASIMO y ver lo que ASIMO ve a través de sus ojos de cámara. ASIMO también puede usar su conexión de PC para acceder a Internet y recuperar información por usted, como informes meteorológicos y noticias.
El controlador de joystick inalámbrico opera los movimientos de ASIMO de la misma manera que lo haría con un automóvil a control remoto. Puedes hacer que ASIMO avance, hacia atrás, oblicuo, diagonalmente, girar en su lugar, Camine alrededor de una esquina o corra en círculos. Hacer que ASIMO se mueva por control remoto puede no parecer tan avanzado, pero ASIMO tiene la capacidad de autoajustar sus pasos . Si lo tienes camina hacia adelante y encuentra una pendiente o algún tipo de obstáculo, ASIMO ajusta automáticamente sus pasos para adaptarse al terreno.
ASIMO puede reconocer y reaccionar ante varios gestos y posturas corporales, permitiendo a los usuarios ordenar ASIMO de forma no verbal. Puede señalar un lugar en particular hacia el que desee que ASIMO camine, por ejemplo, y seguirá tu ejemplo. Si saluda a ASIMO, responderá con una ola propia. Incluso puede reconocer cuándo quieres estrecharle la mano.
ASIMO puede comprender y ejecutar de manera simple, comandos verbales preprogramados. El número de comandos que se pueden programar en su memoria es prácticamente ilimitado. También puedes tener tu voz registrada en su programación, facilitando que ASIMO te reconozca.
Además de los comandos de voz para controlar los movimientos de ASIMO, También hay comandos hablados a los que ASIMO puede responder verbalmente. Esta es la característica que ha hecho posible que ASIMO trabaje como recepcionista, saludar a los visitantes y responder preguntas.
Como la mayoría de las otras tecnologías en el campo de la robótica, ASIMO funciona con servomotores . Estos son motores pequeños pero potentes con un eje giratorio que mueve las extremidades o superficies a un ángulo específico según lo indique un controlador. Una vez que el motor haya girado al ángulo apropiado, se apaga hasta que se le indique que gire de nuevo. Por ejemplo, un servo puede controlar el ángulo de la articulación del brazo de un robot, manteniéndolo en el ángulo correcto hasta que necesite moverse, y luego controlar ese movimiento. Los servos usan un dispositivo de detección de posición (también llamado decodificador digital) para asegurar que el eje del motor esté en la posición correcta. Suelen utilizar una potencia proporcional a la carga mecánica que llevan. Un servo ligeramente cargado, por ejemplo, no consume mucha energía.
ASIMO tiene 34 servomotores en su cuerpo que mueven su torso, brazos, manos, piernas, pies, tobillos y otras partes móviles. ASIMO gestiona una serie de servomotores para controlar cada tipo de movimiento.
ASIMO funciona con un recargable, 51,8 voltios batería de iones de litio (Li-ION) que dura una hora con una sola carga. La batería se almacena en ASIMO mochila y pesa sobre 13 libras . La batería de ASIMO lleva tres horas para cargar completamente, por lo que una segunda (y tercera) batería es crucial si necesita que ASIMO funcione durante mucho tiempo. Los usuarios pueden cargar la batería a bordo del ASIMO a través de una conexión de alimentación o quitar la mochila para cargarla por separado.
Competiciones de robots
Honda Research Institute y ATR Computational Neuroscience Laboratories se asociaron en 2006 para desarrollar un medio de controlar ASIMO a través del pensamiento. Los científicos e ingenieros utilizaron una máquina de resonancia magnética para registrar los patrones cerebrales de un sujeto cuando realiza una serie de gestos con las manos (un puño cerrado y el signo de la paz "V"). Luego, la grabación se transmitió a una mano robótica, que decodificaba la información y duplicaba los gestos del sujeto. Debido a que el sistema de resonancia magnética no era invasivo, no hubo necesidad de ningún procedimiento quirúrgico.
Honda espera que este sea el primer paso en el desarrollo de un sistema que permitirá a las personas paralizadas controlar dispositivos como ASIMO simplemente pensando en ello. Se debe realizar mucha más investigación para permitir a los usuarios ejecutar tareas complejas y desarrollar una Dispositivo ligero para registrar patrones cerebrales.
¿Tienes curiosidad por los servos?Consulte la Introducción a los servomotores del Laboratorio de diseño mecatrónico de la Universidad Northwestern.
Lee mas
Honda comenzó a desarrollar su robot ayudante humanoide en 1986. Los ingenieros de Honda sabían que el robot tenía que poder desplazarse fácilmente por una casa o un edificio. y eso significaba que la tecnología para caminar tenía que ser perfecta. Por lo tanto, sus primeros intentos fueron básicamente cajas con patas. Una vez que se desarrolló en su mayor parte el mecanismo de la marcha, brazos, Se agregaron manos y finalmente una cabeza.
La línea de tiempo de ASIMO
 Foto cortesía
Foto cortesía Además de ASIMO, hay otros robots humanoides bastante sofisticados que parecen hacer muchas de las mismas cosas. La mayoría de ellos se basan en una gran menor escala y están destinados más a entretenimiento que el servicio. Ahora, La mayor competencia de ASIMO en términos de tecnología parece ser:
También hay varios robots diferentes que se utilizan en hospitales de todo el mundo que navegan por los pasillos y toman ascensores para entregar registros de pacientes. rayos X, medicamentos y otras cosas por todo el hospital. Viajan sobre ruedas y se programan con el diseño del hospital o identifican y siguen marcadores y códigos de barras colocados en las paredes.
Los robots se han utilizado en muchas áreas desde la década de 1960. Con los procesadores de computadoras cada vez más potentes y la tecnología en robótica expandiéndose a nuevas áreas, No pasará mucho tiempo antes de que tengamos una "Rosie" para cocinar nuestras comidas y limpiar nuestras casas.
Para obtener más información sobre ASIMO y otros robots, así como los avances tecnológicos que hacen posibles los robots humanoides, consulte los enlaces en la página siguiente.
Un robot en la ciudadASIMO ha cautivado al público en eventos de medios, programas de televisión, e incluso Disneyland. Es posible que haya visto ASIMO: