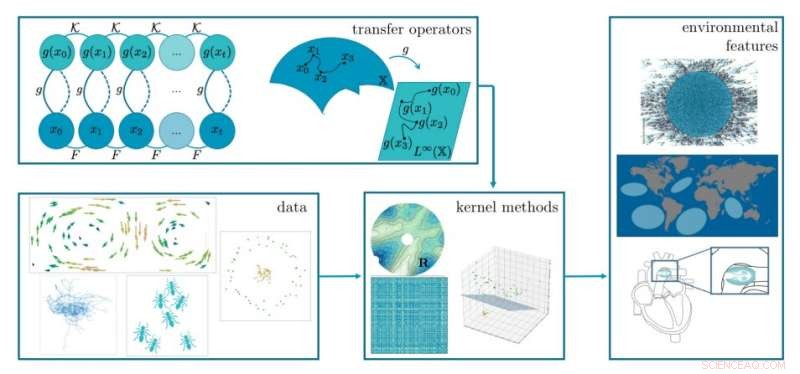
Diagrama de interacción entre datos, operadores de transferencia, métodos kernel y características ambientales. Los operadores de transferencia representan sistemas dinámicos, donde un estado x ∈ X se eleva a un espacio L∞X y g(x) proporciona propiedades físicas del sistema. Muchos sistemas están definidos por datos que muestran patrones complejos, como dos anillos anidados, flujos en los océanos, trayectorias de taxi y comportamientos biológicos. Los métodos del kernel transforman estos datos en un espacio alternativo con el uso de funciones del kernel. Entonces, los datos son más fáciles de interpretar, por ejemplo, separando dos anillos anidados o creando una matriz de Gram para usar en un algoritmo kernel. Los operadores de transferencia se representan a través de métodos de kernel mediante la incorporación de sistemas dinámicos en un espacio de kernel, R. Los algoritmos de Kernel extraen características ambientales de los operadores de transferencia, como dónde los humanos tienden a congregarse en multitudes, áreas de giros en los océanos o patrones de flujo sanguíneo en corazones . Crédito:Salam, Edwards y Hsieh.
En los últimos años, los especialistas en robótica han creado una variedad de sistemas que eventualmente podrían operar en entornos del mundo real. Dado que la mayoría de los entornos del mundo real, en particular los espacios públicos, son dinámicos e impredecibles, para navegar de manera eficiente en estos entornos, los robots deben poder comprender bien su entorno.
Investigadores del Laboratorio GRASP de la Universidad de Pensilvania han llevado a cabo recientemente un estudio que investiga cómo las características relacionadas con un entorno determinado pueden mejorar la conciencia de un robot y su capacidad para navegar por su entorno. Su artículo, publicado previamente en arXiv, se basó en dos de sus esfuerzos de investigación anteriores.
El primero de estos estudios previos introdujo una serie de estrategias que utilizaron información ambiental para mejorar la autonomía de un robot al competir en una tarea específica, a saber, localizar la fuente de un derrame químico en flujos turbulentos. Como parte del segundo estudio, por otro lado, el equipo introdujo nuevas políticas de control a nivel de agente que aprovecharon las características ambientales o el ruido para mantener una distribución espacial deseada del agente robótico de detección en un entorno de flujo geofísico.
"Nuestros trabajos anteriores se centraron en las estructuras coherentes lagrangianas, una característica importante de los sistemas dinámicos en muchas aplicaciones, como la oceanografía y la predicción meteorológica, y cómo se pueden usar en robótica", dijo Tahiya Salam, una de las investigadoras que llevó a cabo el estudio. TechXplore. "Nuestro nuevo trabajo se centra en cómo se puede aprender en línea una característica similar, conjuntos coherentes, y nuevos enfoques sobre cómo se pueden usar estas características en aplicaciones robóticas, como el monitoreo de multitudes en entornos urbanos y la navegación energéticamente eficiente en el agua".
En su nuevo estudio, Salam y los otros investigadores del Laboratorio GRASP utilizaron una serie de técnicas que combinan enfoques de dinámica global con aprendizaje automático. En este contexto, el término "dinámica global" se refiere a la dinámica general de un entorno dado y las características que caracterizan esta dinámica.
"La técnica que utilizamos nos permitió aprender características globales a partir de datos recopilados de los entornos en los que operan los robots", explicó Salam. "Las características globales, denominadas conjuntos coherentes, tienen propiedades interesantes, es decir, representan regiones que se dispersan muy lentamente. Usando esta información sobre regiones que se dispersan muy lentamente, los robots pueden aprovechar estas características para la toma de decisiones".
Salam y sus colegas calcularon estos llamados "conjuntos coherentes" en línea utilizando técnicas de aprendizaje automático. Posteriormente, diseñaron un marco que podría controlar los comportamientos de un robot en función de las características ambientales que calcularon.
"Encontramos una manera de calcular conjuntos coherentes en tiempo real sin tener información detallada sobre un modelo que describe el entorno", explicó Salam. "Además, pudimos usar estos conjuntos coherentes de manera inteligente para lograr comportamientos de robots inteligentes".
Salam y sus colegas evaluaron el marco que desarrollaron en una serie de experimentos y descubrieron que superó significativamente a los métodos fuera de línea para calcular las características ambientales. El equipo demostró específicamente la efectividad del modelo que desarrollaron en dos escenarios donde los robots monitorearon entornos urbanos y navegaron sobre el agua.
En el futuro, el marco presentado por este equipo de investigadores podría ayudar en última instancia a mejorar la capacidad de los robots existentes y emergentes para navegar en entornos desconocidos y dinámicos. Mientras tanto, Salam planea explorar más a fondo el potencial del uso de funciones ambientales para mejorar la navegación de los robots.
"En mis próximos estudios, continuaré investigando técnicas que conecten la dinámica global y el aprendizaje automático en marcos más generales", agregó Salam. "Por ejemplo, me gustaría representar la dinámica global de entornos arbitrarios a partir de mediciones de sensores recopiladas por robots".