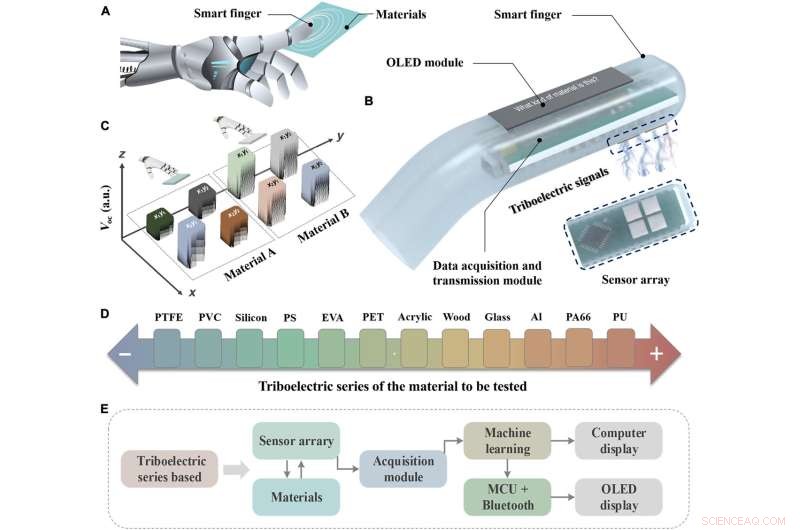
(A) Diagrama esquemático del proceso de identificación de materiales del dedo inteligente de percepción táctil triboeléctrica. (B) Estructura del dedo inteligente de percepción táctil triboeléctrica, que consta de una matriz de sensores triboeléctricos, un módulo de adquisición y transmisión de datos y un módulo de visualización. (C) Diagrama esquemático de las señales de salida de la matriz de sensores triboeléctricos cuando el dedo inteligente identifica diferentes materiales. a.u., unidades arbitrarias. (D) Materiales típicos ubicados en diferentes posiciones en la serie triboeléctrica:la electronegatividad aumenta de derecha a izquierda; por el contrario, la electropositividad aumenta de izquierda a derecha. (E) Diagrama de flujo de la interacción entre los módulos del dedo inteligente al identificar materiales. Crédito:Avances científicos (2022). DOI:10.1126/sciadv.abq2521
Un equipo de investigadores de la Academia de Ciencias de China ha desarrollado un dedo artificial que pudo identificar ciertos materiales superficiales con un 90% de precisión. En su artículo publicado en la revista Science Advances , el grupo describe cómo usaron sensores triboeléctricos para darle a su dedo de prueba la capacidad de obtener el sentido del tacto.
La investigación previa ha llevado al desarrollo de dedos robóticos que tienen la capacidad de reconocer ciertos atributos de ciertas superficies, como la presión o la temperatura; el equipo con este nuevo esfuerzo ha llevado esos esfuerzos aún más al agregar la capacidad de identificar un material que es ser tocado.
El dedo se creó aplicando pequeños sensores cuadrados a la punta de un objeto con forma de dedo. Cada uno de los cuadrados estaba hecho de un tipo diferente de polímero plástico, cada uno elegido por sus propiedades eléctricas únicas. Cuando dichos sensores se mueven cerca de un objeto, como una superficie plana, los electrones de los sensores interactúan con los materiales de formas únicas.
Todos los sensores debajo del polímero se conectaron a sus propios procesadores dentro del dedo, que luego se conectaron entre sí para permitir la comparación de los resultados y el análisis de datos basado en el aprendizaje automático. Los investigadores también adjuntaron una pequeña pantalla LCD para mostrar los resultados. Luego, los investigadores probaron su dedo haciéndolo tocar varias superficies planas, como las de vidrio, madera, plástico y silicona. Lo encontraron capaz de detectar el material correcto en promedio el 96,8 % de las veces, con una precisión mínima del 90 % para todas las superficies. Los investigadores también probaron la resistencia del dedo haciéndolo tocar una superficie miles de veces y descubrieron que aguantaba lo suficientemente bien para aplicaciones industriales.
Los investigadores sugieren que si su dedo se usara en un entorno industrial, podría conectarse directamente a un mecanismo de control. También sugieren que podría usarse para probar productos para garantizar que cumplan con los estándares de fabricación. Y también señalan que dicho dedo también podría usarse en un robot humano de tamaño completo, lo que aumentaría sus capacidades. Señalan que la tecnología detrás de su dedo probablemente podría usarse en dispositivos protésicos para ayudar a restaurar un cierto grado de tacto para las personas que han perdido esa capacidad.
© 2022 Red Ciencia X Robots de almacén que sienten con la vista