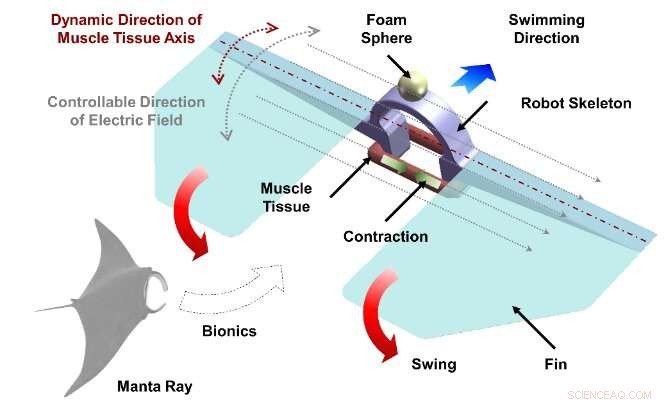
Este nadador biosincrético estaba compuesto por una estructura de esqueleto, dos aletas, un actuador vivo y una microesfera de equilibrio de espuma. Crédito:Chuang Zhang, Instituto de Automatización de Shenyang, Academia de Ciencias de China
La naturaleza ha brindado un gran apoyo para el desarrollo de los robots. Inspirándose en las mantarrayas, un equipo del State Key Laboratory of Robotics del Shenyang Institute of Automation, Chinese Academy of Sciences, ha desarrollado un robot biónico de natación que es accionado por tejido muscular esquelético cultivado y controlado por electrodos circulares distribuidos múltiples (CDME) . El robot puede ser propulsado eficientemente por un solo tejido muscular.
La biomimética es uno de los métodos de investigación robótica más importantes, que puede mejorar el rendimiento cinemático de los robots al imitar la estructura y el comportamiento de los organismos naturales. El robot biosincrético, que utiliza materiales biológicos naturales como elemento central, es el mayor desarrollo de la biónica.
Algunas células vivas se han utilizado para realizar algunas funciones de los robots, incluida la detección, el control y la actuación. Sin embargo, se necesitan métodos innovadores de propulsión y control para seguir desarrollando el rendimiento de movimiento controlable de los robots biosincréticos. Para resolver este problema, los investigadores propusieron un método de control dinámico basado en CDME. La investigación fue publicada en la revista Cyborg and Bionic Systems .
El equipo descubrió que el campo eléctrico generado por CDME era menos dañino para el medio de cultivo y las células que los electrodos convencionales. Usando este método, la dirección del campo eléctrico generado por el electrodo podría controlarse dinámicamente, manteniéndolo paralelo al tejido conductor del robot en tiempo real, asegurando así un control estable del robot.
Primero, el equipo diseñó el esqueleto del robot basándose en la estructura de la mantarraya y utilizó polidimetilsiloxano (PDMS) como material principal para la estructura. Al mismo tiempo, para facilitar el ensamblaje del tejido conductor y la estructura del robot, los investigadores eligieron el tejido en forma de anillo fabricado por mioblastos como unidad impulsora del robot.
Además, para obtener tejidos musculares circulares con contractilidad efectiva, se utilizó una estimulación eléctrica rotacional del CDME para realizar una inducción uniforme de los mioblastos para diferenciarse en miotubos. Para permitir que el robot nade a la velocidad deseada, se midió la contractilidad del tejido muscular antes de ensamblarlo con la estructura del nadador. El equipo de investigación también utilizó métodos de simulación para analizar la relación entre el rendimiento del movimiento del robot y la fuerza de contracción del tejido impulsor.
Finalmente, para demostrar el movimiento estable y controlable del robot biosincrético propuesto, los investigadores realizaron la natación controlable del robot a diferentes velocidades utilizando el método de estimulación eléctrica dinámica propuesto. En el experimento, el robot demostró una natación eficaz y una capacidad de control estable, lo que verificó la eficacia del diseño biomimético y el método de control basado en CDME propuesto por el equipo de investigación.
El diseño biomimético y el método de control de actuación propuesto en este estudio no solo promueven un mayor desarrollo de los robots biosincréticos, sino que también tienen cierta importancia como guía para el diseño biomimético de robots blandos, la ingeniería de tejido muscular y otros campos relacionados.
Sin embargo, aunque los robots biosincréticos actuales han logrado un movimiento controlado efectivo, todavía hay muchos cuellos de botella clave que deben superarse. Por ejemplo, la mayoría de los robots tienen un tamaño de centímetros, lo cual es difícil para aplicaciones como la administración de fármacos in vivo.
Las tecnologías que incluyen la impresión 3D y la manipulación flexible orientada a estructuras micro-nano biológicas son clave para desarrollar micro-robots biosincréticos para aplicaciones clínicas y otros entornos especiales. Además, la mayoría de los robots biosincréticos existentes se basan en estímulos artificiales externos para lograr un movimiento controlado, que puede carecer de autonomía. Por lo tanto, el método de detección y control basado en células vivas puede aplicarse a la investigación de robots biosincréticos para realizar movimientos autónomos de robots basados en información ambiental. Un método inspirado en los castores para guiar los movimientos de un robot nadador con una sola pierna