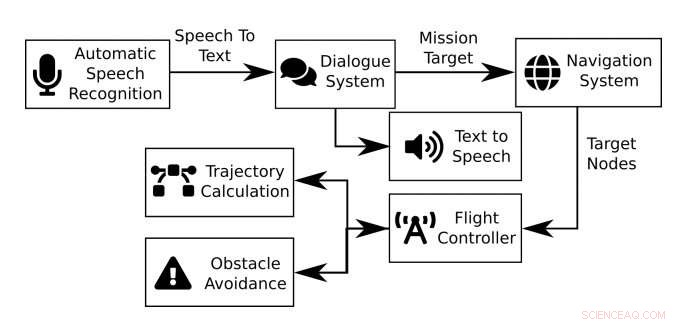
Una descripción general del sistema. Crédito:Fuhrman et al.
Investigadores del Instituto de Tecnología de Karlsruhe en Alemania han desarrollado recientemente un dron interactivo diseñado para ayudar a los humanos en ambientes interiores como oficinas o laboratorios. En un artículo prepublicado en arXiv, los investigadores presentaron los resultados obtenidos por su dron al realizar tareas sencillas en el laboratorio.
"En este papel, presentamos un asistente de drone de oficina interior que tiene la tarea de hacer recados y realizar tareas simples en nuestro laboratorio, mientras reciben instrucciones e interactúan con humanos en el espacio, "escribieron los investigadores en su artículo.
El enfoque para diseñar el dron adoptado por los investigadores se centra en la noción de "misiones, "lo que implica recibir parámetros de entrada y cumplir con las condiciones adecuadas, o "metas". Para completar con éxito una misión, su dron debería poder lograr todos los objetivos asociados con él.
"En el caso del sistema presentado en este documento, el parámetro de entrada es una solicitud verbal para volar a un destino determinado (habitación o persona) en un entorno de oficina, "Los investigadores explicaron en su artículo." El objetivo de la misión es alcanzar el objetivo sin ninguna intervención manual y colisión con obstáculos estáticos o dinámicos ".
El dron interactivo presentado por los investigadores es una versión modificada del dron Crazyflie 2.0, diseñado por una empresa llamada Bitcraze. Tiene varios componentes:un subsistema de reconocimiento automático de voz (ASR) que transcribe las solicitudes verbales de un usuario; un sistema de diálogo que recibe estas solicitudes, los procesa e identifica el objetivo dentro de la oficina, y un controlador de vuelo que planifica la trayectoria del dron hacia el objetivo deseado mientras intenta evitar colisiones con obstáculos.
Los investigadores decidieron evaluar cada uno de los componentes del sistema por separado para identificar claramente las características que debían perfeccionarse. Para evaluar el sistema de diálogo, pidieron a tres hablantes no nativos de inglés que dieran instrucciones verbales simples en voz alta, por ejemplo, ordenar que el dron vuele a una habitación diferente o visite a otra persona en el laboratorio.
Después, Los investigadores probaron la percepción de profundidad de su dron y las capacidades para evitar colisiones presentando al dron tres tipos diferentes de obstáculos:una puerta cerrada, una persona, y un banco de metal. Finalmente, investigaron la velocidad a la que su sistema podía completar con éxito las misiones enviándolo a varias salas de destino utilizando instrucciones escritas.

Uno de los drones Crazylife utilizados por los investigadores. Crédito:Fuhrman et al.
Tiempo, Se descubrió que el dron completaba misiones con una tasa de éxito del 77,78 por ciento, encontraron que tenía varias limitaciones. Por ejemplo, Una de las causas más comunes de fracaso de la misión fue que el dron giró ligeramente durante el despegue, ya que sus cuatro hélices comenzaron a funcionar en momentos ligeramente diferentes.
"Como este es nuestro primer prototipo, hay mucho espacio para futuras mejoras, no solo en cada uno de los componentes individuales, sino también en el sistema en su conjunto, ", dijeron los investigadores.
El equipo observó que el sistema de diálogo del dron funcionaba particularmente mal y podía entender las instrucciones de una persona en el 57 por ciento de los casos en el mejor de los casos. El principal problema con el sistema de diálogo era que el ASR presentaba dificultades para identificar los nombres de las personas cuando los usuarios lo pronunciaban. abortando así el proceso de reconocimiento de voz demasiado pronto.
"En el trabajo futuro, queremos utilizar un sistema ARS mejorado, "escribieron los investigadores en su artículo". Además, para permitir una variedad más amplia de lenguaje natural sin aumentar el tamaño del conjunto de datos de entrenamiento, también queremos utilizar un enfoque multitarea. Eso significa que el conjunto de datos de drones se entrenará junto con un conjunto de datos fuera del dominio ".
En las pruebas iniciales, El componente de detección de colisiones del dron funcionó notablemente bien, Previniendo eficazmente colisiones tanto con personas como con objetos grandes en la mayoría de los casos. Sin embargo, se encontró que tenía problemas para detectar muebles muy delgados o translúcidos. Para superar esta limitación, el equipo ahora planea crear un sistema más preciso, mapa en tiempo real del entorno circundante, como actualmente, el sistema basa sus predicciones en un mapa 2-D pregrabado.
"La reducción de los errores de posición también debería ayudar a mejorar nuestra tasa total de éxito de la misión, ya que esta fue una de las principales causas del fracaso de la misión durante nuestras pruebas, Los investigadores explicaron en su artículo. El otro problema que surgió durante nuestras pruebas fue el mal funcionamiento del sistema de percepción de profundidad en condiciones de luz muy brillante o cambiante. También planeamos abordar estos problemas en el futuro ".
Es más, en sus próximos estudios, a los investigadores les gustaría mejorar la duración y la gestión de la batería del sistema, como en este momento, solo puede completar tres o cuatro misiones antes de tener que recargarlo. Eventualmente les gustaría aumentar este número significativamente, al mismo tiempo que presenta nuevas soluciones que podrían ayudar a mitigar este problema.
© 2019 Science X Network