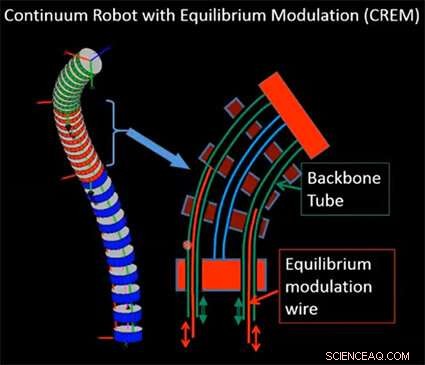
Aumento de una macroescala existente, El robot multi-backbones con capacidades de movimiento a escala micrométrica se logra agregando cables (rojos) dentro de la estructura que pueden deslizarse dentro y fuera de los backbones tubulares. Esto permite la modulación de la forma de equilibrio. El robot aún logra un movimiento (macro) a gran escala utilizando las columnas vertebrales secundarias tubulares unidas rígidamente al disco rojo superior. Por accionamiento directo, empujándolos y tirando de ellos, la configuración del robot continuo cambia. Crédito:Universidad de Vanderbilt
Un nuevo robot continuo diseñado por los ingenieros de Vanderbilt logra un movimiento de múltiples escalas y puede abrir un mundo enorme de microcirugías complejas previamente imposibles.
El robot es capaz de proporcionar tanto un gran espacio de trabajo de macro movimiento como sea necesario para la intervención quirúrgica y un pequeño espacio de trabajo de micro movimientos con resoluciones de movimiento de 1 micrón o menos. Para una sensación de escala, una pulgada contiene 25, 400 micrones. Un glóbulo rojo humano tiene aproximadamente ocho micrones de ancho, del mismo tamaño que algunas bacterias y significativamente más pequeño que el ancho del cabello humano promedio.
"Nuestro diseño logra resoluciones de movimiento de 1 micrón o menos mediante el uso de actuadores económicos. Esta reconfiguración, con un costo adicional mínimo, podría acelerar el desarrollo de una nueva clase de robots quirúrgicos capaces de realizar tanto macromovimientos para intervenciones quirúrgicas como movimientos a microescala para imágenes o intervenciones a nivel celular, "dijo Nabil Simaan, profesor de ingeniería mecánica y director del Laboratorio de Robótica Avanzada y Aplicaciones de Mecanismos.
"Esto amplía enormemente las capacidades de la robótica en la cirugía mínimamente invasiva, " él dijo.
La miniaturización y el rango de movimiento permitirían un control preciso durante los procedimientos en aneurismas complejos, pequeñas venas y arterias, nervios y las delicadas estructuras del ojo, el oído interno y las cuerdas vocales. Las aplicaciones potenciales incluyen biopsias, erradicación de tumores y administración de fármacos dirigida a nivel celular.
Simaan y su equipo han adaptado la arquitectura flexible de su robot continuo anterior para funcionar a escala macro y micro al alterar la pose de equilibrio del robot. que Simaan llama robots continuos con modulación de equilibrio, o CREM.
La arquitectura flexible de los robots continuos anteriores logró un movimiento similar a un gusano para la macromanipulación. El robot está segmentado con discos o anillos como el cuerpo de una lombriz de tierra. Cada disco está unido por pequeñas columnas vertebrales, o tubos de actuación. Añadiendo pequeños alambres elásticos dentro de los tubos de actuación y moviendo los alambres hacia arriba o hacia abajo, el equilibrio estático de las placas cambia, creando movimiento a escala micrométrica.
"Esta nueva clase de robots proporcionará microprecisión mientras atraviesa caminos sinuosos a macroescala hasta el sitio de la operación. Los beneficios potenciales incluyen la reconstrucción exacta del tejido y la erradicación quirúrgica completa de los tumores, "dijo Simaan, una filial del Instituto Vanderbilt de Cirugía e Ingeniería.
El robot utiliza columnas vertebrales secundarias tubulares para lograr la gran escala de movimiento. Empujándolos y tirando de ellos, la configuración del robot continuo cambia. La adición de cables que pueden deslizarse dentro y fuera de las columnas vertebrales tubulares permitió al equipo de investigación modular la forma de equilibrio.
Adicionalmente, se están realizando pruebas exhaustivas para la incorporación de la tomografía de coherencia óptica, que es efectivamente un "ultrasonido óptico" que permite obtener imágenes de reflejos desde el interior del tejido.
Simaan y sus colegas, el estudiante graduado de ingeniería mecánica Giuseppe Del Giudice, El profesor asistente de investigación de Oftalmología y Ciencias Visuales Jin-Hui Shen y la médica Karen M. Joos, Joseph N. y Barbara H. Ellis, Profesora de Oftalmología de la Familia, han logrado una integración preliminar de una sonda OCT hecha a medida.
El interés de investigación particular de Joos es el uso de sondas OCT en miniatura con herramientas quirúrgicas robóticas para mejorar la visualización de los procedimientos dentro del ojo. La experiencia de Del Giudice está en el diseño y control de robots médicos de micro-continuum, específicamente micromanipulación para cirugía oftálmica.
Ampliar las capacidades de un robot continuo estándar en términos de movimiento y focalización a microescala podría tener un impacto profundo en la microcirugía al proporcionar una destreza significativamente mayor. controlabilidad y precisión para los cirujanos o incluso el pionero de procedimientos previamente imposibles, Dijo Simaan.














