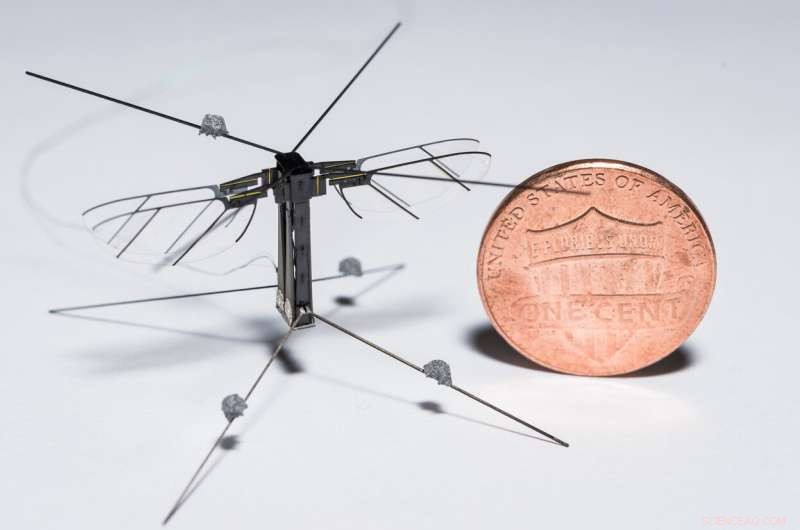
Insecto robótico volador Bee +. Crédito:Xiufeng Yang.
Uno de los problemas clave que enfrentan los investigadores en el campo de la microrrobótica es el diseño e implementación de controladores confiables para microvehículos aéreos a escala de insectos (FWMAV), que son pequeños robots voladores típicamente inspirados en insectos. De hecho, aunque estos robots del tamaño de un insecto podrían tener numerosas aplicaciones útiles, por ejemplo, ayudar a los humanos en misiones de búsqueda y rescate o en la agricultura, desarrollar controladores que se ajusten a su tamaño y estructura ha resultado ser difícil hasta ahora.
Investigadores de la Universidad del Sur de California (USC) han llevado a cabo recientemente un estudio que explora los desafíos en el diseño de estos controladores. En su papel prepublicado en arXiv, introducen un nuevo enfoque unificador que podría informar el desarrollo de técnicas más efectivas para el control de FWMAV. Los investigadores detrás del estudio son parte del laboratorio autónomo de sistemas microrobóticos (AMSL), que es heredera de una línea de investigación que comenzó en UC Berkeley hace más de 20 años, Continuó en Harvard desde 2005 y llegó a la USC en 2013.
"Nosotros, Como un equipo, compartir el mismo sueño de muchos en la comunidad de microrrobótica; la visión de crear insectos artificiales totalmente autónomos que puedan operar de manera inteligente en entornos altamente desestructurados, "Prof. Nestor O Perez-Arancibia, el investigador principal (IP) del estudio, dijo a TechXplore. "Personalmente, Me inspira la naturaleza. Nuestras maquinas, incluyendo Bee +, que es una obra de ingeniería asombrosa, todavía están por detrás de los insectos reales en términos de capacidades acrobáticas, actuación sintiendo potencia de cálculo, etc. "
Pérez-Arancibia ha estado realizando investigaciones sobre sistemas microrobóticos durante varios años. Él cree que todas las máquinas creadas por humanos podrían mejorarse en última instancia si se inspirara en la naturaleza, por ejemplo, observando y replicando el comportamiento o las características de las abejas, mariposas y mosquitos.

Insecto robótico volador Bee +. Crédito:Xiufeng Yang.
En su estudio, Pérez-Arancibia y sus colegas investigaron el control de insectos voladores utilizando dos plataformas experimentales diferentes:un robot de dos alas con forma de abeja y el micorobot Bee + de cuatro alas desarrollado en la USC. En una serie de experimentos, pudieron demostrar que una técnica que emplea coordenadas de cuaternión para el control de actitud, que está diseñado para controlar vehículos no tripulados con cuatro rotores, se puede aplicar para conducir estos dos insectos robóticos.
"Pudimos simplificar algo que muchos investigadores consideran muy difícil, ", Dijo Pérez-Arancibia." Me gusta creer que este es un caso en el que el modelado inteligente (es decir, mirando el problema desde una perspectiva nueva y 'mejor'), podemos comprender y analizar fenómenos complejos aparentemente intratables que pueden ayudarnos a desarrollar mejores diseños robóticos, especialmente en términos de generación de fuerza aerodinámica, configuración y actuación del mecanismo ".
Los resultados de las pruebas realizadas por Pérez-Arancibia y sus colegas sugieren que la estrategia genérica que introdujeron podría usarse para controlar diferentes tipos de insectos artificiales que comparten algunas características comunes. Si bien demostraron específicamente la efectividad de esta estrategia en un robot de dos alas y el robot Bee + de cuatro alas, Potencialmente, también podría aplicarse a otros microrobots similares a insectos.
Pérez-Arancibia cree que al seguir un enfoque de control de alto nivel que desacopla los problemas de actuación y control de vuelo, es posible identificar algoritmos generales que se pueden emplear en múltiples plataformas. Por ejemplo, Este enfoque podría permitir a los investigadores desarrollar nuevos algoritmos para el vuelo acrobático empleando cuadrotores de 19 gramos que posteriormente podrían implementarse en un miligramo de 95, abeja de cuatro alas +.
"Esto es relevante porque a medida que los volantes robóticos se hacen más pequeños, también se vuelven más difíciles de fabricar, más difícil de manejar y más caro, "Dijo Pérez-Arancibia." En consecuencia, como se muestra en nuestro artículo, el hecho de que se pueda emplear el mismo enfoque para sintetizar controladores para plataformas con diferencias de peso de hasta dos órdenes de magnitud es significativo y relevante tanto desde la perspectiva de la investigación como desde la práctica ".
En el futuro, El enfoque introducido por este equipo de investigadores de la USC podría informar el diseño y la implementación de nuevos controladores para microrobots similares a insectos. Además, durante los próximos meses, Pérez-Arancibia y sus colegas trabajarán en un proyecto diferente destinado a crear el primer insecto artificial volador subgramo totalmente autónomo.
"En la actualidad, la principal limitación que ha impedido a los microroboticistas lograr un vuelo autónomo a una escala de subgramo es la densidad de energía extremadamente baja de las baterías eléctricas, Pérez-Arancibia dijo:"Lograremos la autonomía empleando músculos artificiales impulsados por reacciones catalíticas".
© 2019 Science X Network