Resultado de la simulación de una articulación del codo que realiza una flexión de la articulación isocinética. Húmero, El cúbito y el radio están modelados con filamentos rígidos en violeta. Los tendones están modelados con filamentos ahusados en amarillo. Dos cabezas de bíceps que constan de 36 filamentos realizan la máxima contracción voluntaria. Se aplican condiciones de contorno para asegurar una velocidad angular constante. Crédito:Nature Communications, doi:10.1038 / s41467-019-12759-5
Los científicos de la vida y los bioingenieros estudian los sistemas y organismos naturales para comprender sus mecanismos biofísicos, para impulsar aplicaciones de ingeniería biomimética en el laboratorio. En un informe reciente sobre Comunicaciones de la naturaleza , Xiaotian Zhang y sus colegas en los Departamentos de Ingeniería Mecánica y Aplicaciones de Supercomputación en los EE. UU. Presentaron un enfoque numérico para simular arquitecturas musculoesqueléticas. El método se basó en el ensamblaje de varillas Cosserat activas y pasivas heterogéneas (una curva basada en varillas dirigidas deformables) en estructuras dinámicas para modelar huesos, tendones ligamentos, fibras y conectividad muscular. Demostraron aplicaciones de la técnica resolviendo una variedad de problemas en escenarios biológicos y robóticos suaves en muchos entornos y escalas. El equipo diseñó robots biohíbridos a escala milimétrica y reconstruyó sistemas musculoesqueléticos complejos. El método es versátil y ofrece un marco para ayudar a los diseños de bioingeniería hacia adelante y hacia atrás para los descubrimientos fundamentales sobre las funciones de los organismos vivos.
Los sistemas musculoesqueléticos contienen huesos, músculos, tendones y ligamentos para funcionar juntos en sistemas biológicos nativos. Curiosamente, tales arquitecturas contienen un nexo inseparable entre actuación y control, topología y mecánica debido a constituyentes no lineales. En marcado contraste con los robots de cuerpo rígido, criaturas biológicas blandas pueden implementar deformaciones e inestabilidades estructurales para funcionar dentro de complejos, Ambientes no estructurados y dinámicos. Las arquitecturas biológicas musculoesqueléticas poseen una distribución intrínseca, suavidad y conformidad para subcontratar las tareas de control a una variedad de compartimentos. Esta propiedad proporciona la base para un paradigma emergente en la robótica de inspiración biológica conocida como computación morfológica o inteligencia mecánica. Las consideraciones han llevado a una variedad de avances experimentales en robótica blanda con materiales artificiales compatibles para formar robots biohíbridos blandos. A pesar de los avances experimentales en el campo, Los esfuerzos para modelar y simular arquitecturas musculoesqueléticas dinámicas a través de estructuras biológicas y sintéticas quedan por lograr.
Simulando la articulación del codo humano
Zhang y col. demostró por primera vez un método para incluir la dinámica completa de deformación, como la flexión, giro, cizallamiento y estiramiento involucrados con arquitecturas biológicas. Para esto, se basaron en trabajos anteriores sobre varillas cosserat para establecer un enfoque de modelado musculoesquelético para simular de manera realista activos, diseños biológicos heterogéneos en un enfoque escalonado para sintetizar y replicar arquitecturas vivas con capas biológicas de complejidad para aplicaciones biomiméticas avanzadas. El trabajo les permitió replicar sistemas biológicos imitando la biomecánica subyacente y les proporcionó acceso para estudiar y comprender las funciones biofísicas de los organismos biológicos en el silicio. El estudio demostró que las aplicaciones de los modelos de varillas desempeñan un papel valioso al modelar sistemas activos complejos para arquitecturas biomiméticas.
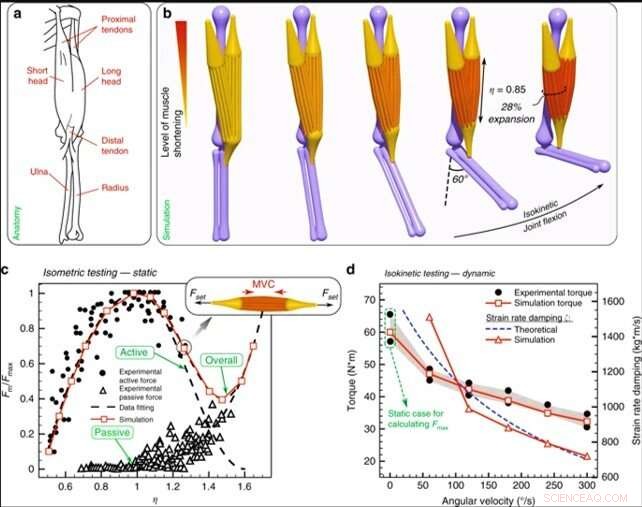
Accionamiento del codo humano. (a) Anatomía del codo. (b) Simulación de un codo compuesto por tres huesos (húmero, cúbito y radio) y dos cabezas de bíceps (cabeza corta y larga) realizando una flexión completa. (c) Datos experimentales y simulaciones para la fuerza activa y pasiva normalizada con la fuerza máxima (Fm / Fmax) durante el ejercicio isométrico (Fset imita la resistencia encontrada por el músculo y da como resultado su longitud de equilibrio η). (d) Mediciones de torque experimentales y de simulación de la articulación del codo (en ángulo de 60 °) que realizan flexiones concéntricas isocinéticas máximas a diferentes velocidades angulares junto con la correspondiente amortiguación de la tasa de deformación muscular general ζ. Los ζ determinados numéricamente se comparan luego con estimaciones teóricas basadas en el modelo de Hill. Crédito:Nature Communications, doi:10.1038 / s41467-019-12759-5
Durante la primera simulación biomimética, Zhang y col. usó una articulación del codo humano con músculos, tendones y huesos para ilustrar los ensamblajes de varillas asignados a la fisiología, dinámica y morfología. Por ejemplo, la articulación del codo mostró características blandas y rígidas, dinámica simplificada y espacio de configuración reducido. El análisis les permitió verificar y calibrar el modelo basándose en datos anatómicos y biomecánicos fácilmente disponibles para relacionarlo con el modelo de Hill. El nivel de detalle de la representación les permitió abordar las necesidades kinesiológicas específicas del paciente humano y reconstruir virtualmente una réplica tridimensional de una articulación del codo humano utilizando pruebas isométricas e isocinéticas aplicables a la ingeniería del tejido óseo. Los científicos podrían modelar, calibrar y validar la actuación de una unidad muscular individual, donde el resultado reproducía la dinámica y morfología de un sistema biológico. El enfoque de modelado actual presenta características clave que lo distinguen del modelo de Hill, para incluir (a) varillas individuales para el reclutamiento selectivo para imitar una lesión, y (b) músculos dóciles que pueden doblarse, Gire y cizalle de manera realista a las fuerzas dinámicas en toda la estructura o dentro del entorno.
Ingeniería de robots biohíbridos
En el próximo experimento, El equipo diseñó robots biohíbridos utilizando su solucionador computacional para guiar el diseño y la fabricación de robots biohíbridos que nadan y caminan a escala milimétrica. Para investigar el comportamiento de nado de los robots, Primero resolvieron problemas utilizando modelos numéricos y simulaciones de un flagelo biohíbrido previamente establecido. Para esto, crearon una réplica exacta del nadador original y modelaron el sustrato de polidimetilsiloxano (PDMS) para imitar la geometría experimental y las propiedades del material con células agrupadas vivas modeladas como una pequeña, filamento blando y contráctil conectado al sustrato. Las observaciones cualitativas y cuantitativas del movimiento de natación entre la simulación y el experimento coincidieron bien.
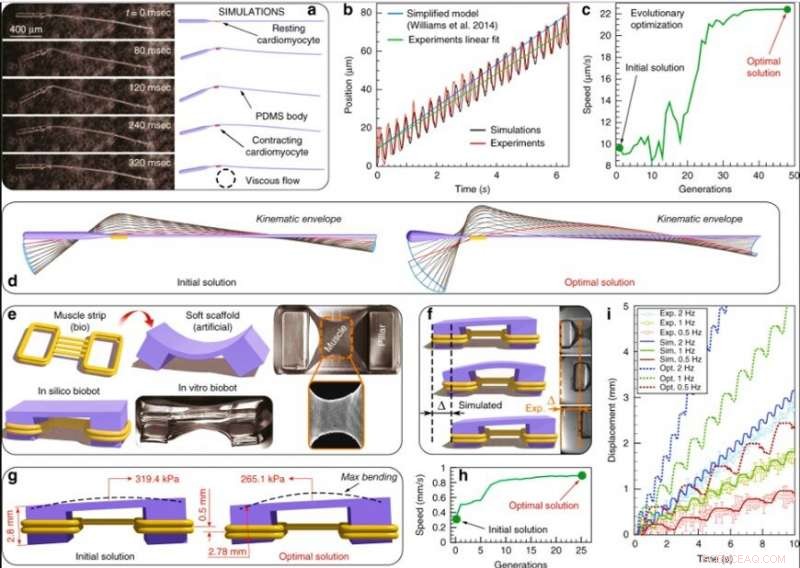
Diseño robótico biohíbrido. (a) Comparación uno a uno del robot con fotografías experimentales en diferentes etapas dentro de un ciclo de nado. (b) Posición axial del centro del robot monitoreada durante más de 20 ciclos en comparación con los datos experimentales. (c) Curso de optimización:la convergencia a la solución óptima se observa después de 48 generaciones. La optimización se limitó con la longitud de la cabeza dentro de [0, 1.927] mm, radio de la cabeza dentro de [4, 40] μm, radio de la cola dentro de [4, 6.5] μm y ubicación de la celda en cualquier punto a lo largo de la cola. La dimensión longitudinal del bot se fija en L =1.927 mm, de modo que la longitud de la cola se pueda inferir de la longitud de la cabeza. Los rangos de parámetros se determinan para tener en cuenta la capacidad de fabricación real. (d) Visualización tanto del diseño original como del óptimo mostrando configuraciones en reposo y envolventes cinemáticas de línea media durante un período. Detalles originales del nadador:el sustrato está modelado con una cabeza de 424 μm de largo y una cola de 1503 μm de largo con radios de 20 μm y 7 μm respectivamente. Densidad ρ =0.965gcm − 3, Módulo de Young E =3.86MPa, rigidez a la flexión EI =2.427 × 10−9Nmm2, masa m =7.364 × 10−7g. La celda contráctil se modela con un radio de 10 μm y una longitud de 100 μm. La celda está configurada para producir una fuerza de contracción F =σmA =12μN con una frecuencia de batido f =3.6Hz23. El fluido tiene una viscosidad dinámica μ =1.2 × 10−3Pa⋅s. Detalles optimizados del nadador:el sustrato tiene una longitud y un radio de 190 μm y 32,3 μm, respectivamente. La celda contráctil está unida a 190 μm de distancia de la cabeza y la cola tiene un grosor de 4,3 μm. (e) Diseño general del andador con elementos amarillos que representan anillos musculares y elementos morados que representan el esqueleto. Imágenes experimentales adaptadas de estudios previos. (f) Simulaciones versus experimentos:Desplazamiento del bot durante 2 segundos para la frecuencia de actuación de 1 Hz. (g) Visualización del diseño inicial y optimizado del andador. (h) El curso de optimización converge después de 25 generaciones. La optimización se limitó con el módulo de Young del esqueleto [250-350] kPa, longitud del pilar más corto [2,4–3,4] mm y ubicación de la franja muscular [0,5–3] mm (distancia desde el suelo), todos los cuales se eligen de acuerdo con las limitaciones de fabricación. (i) Comportamiento dinámico del andador simulado (líneas continuas) y experimental (marcadores con barras de error) con contracción muscular a diferentes frecuencias, y comparación del rendimiento al caminar entre el diseño inicial (líneas continuas) y el diseño optimizado adicional (líneas discontinuas). Crédito:Nature Communications, doi:10.1038 / s41467-019-12759-5
Después de modelar y optimizar el nadador biohíbrido, intentaron diseñar computacionalmente un andador biohíbrido como se desarrolló previamente para formar la máquina biológica móvil más rápida hasta la fecha por Pagan-Diaz et al., basado en un robot biohíbrido anterior. Estructuralmente el modelo de Pagan-Díaz contenía un andamio de hidrogel asimétrico y tejidos del músculo esquelético para parecerse a las relaciones músculo-tendón-hueso in vivo y operado en un baño de solución en el laboratorio. Experimentalmente, suspendieron los músculos y los electrocutaron para inducir la contracción del movimiento a través de la asimetría y la fricción.
Zhang y col. simuló esta arquitectura en el presente trabajo, para diseñar un nuevo andamio y arreglos musculares topológicos del bot. La nueva topología de tejido muscular contenía una sección de tira delgada que conectaba dos anillos envueltos alrededor de las piernas del esqueleto para transferir las fuerzas de contracción muscular. que probaron utilizando estudios de referencia. Zhang y col. demostró experimentalmente el plan de cálculo con el modelo Pagan-Diaz para construir un nuevo bio-bot con el doble de velocidad que el robot biohíbrido original; con buena concordancia observada en la simulación. El equipo de investigación mostró el potencial del enfoque computacional para encapsular la física de los sistemas robóticos blandos impulsados por células y músculos para las aplicaciones deseadas para diseñar prototipos más flexibles.

Movimiento deslizante del modelo de serpiente musculoesquelética con cuatro grupos de músculos. La disposición de los grupos de músculos está optimizada para la velocidad de avance más rápida. El color de los grupos de músculos indica el nivel de contracción muscular. Crédito:Nature Communications, doi:10.1038 / s41467-019-12759-5.
Ingeniería de serpientes deslizantes
Luego, el equipo empleó el enfoque numérico ideado dentro del estudio para facilitar la fabricación de robots biohíbridos y comprender la biomecánica. Los bioingenieros habían realizado previamente múltiples experimentos sobre locomoción de serpientes para construir réplicas de robots objetivo utilizando servomotores (actuadores giratorios). En el presente experimento, desarrollaron una serpiente elástica completamente suave inspirada en serpientes reales pero accionada de manera efectiva con varios grupos de músculos y tendones para lograr un movimiento ondulatorio suave. El equipo de investigación demostró que, si bien las serpientes biológicas tenían múltiples músculos para orquestar la marcha y las deformaciones corporales, el modelo solo requería algunas características para deslizarse hacia adelante de manera suave y efectiva.
Para un diseño óptimo, los científicos combinaron su solucionador computacional con el algoritmo de estrategia de evolución y adaptación de la matriz de covarianza (CMA-ES) para identificar las ubicaciones y los patrones de actuación para la máxima velocidad de avance. Zhang y col. comparó y verificó los resultados con simulaciones de referencia y grabaciones experimentales. El equipo tenía como objetivo principal revelar principios de diseño arquitectónico ocultos y exponer su función con fines de ingeniería. Ellos orquestaron cuidadosamente la actuación distribuida para andar suaves y realistas en marcado contraste con sus contrapartes rígidas de robots serpiente. Los investigadores también implementaron un marco para simplificar, probar y utilizar principios biomecánicos de sistemas biológicos complejos para crear un deslizamiento realista, rápido, serpiente robótica suave basada en unos simples actuadores.
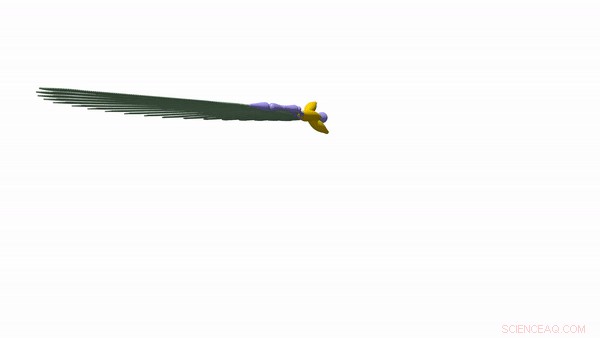
La vista frontal de un par de alas que consta de 6342 filamentos, donde los filamentos verdes indican las plumas. Un proceso de iniciación levanta las alas desde una posición plana y es seguido por una sola carrera hacia abajo y hacia arriba durante la etapa de despegue. Crédito:Nature Communications, doi:10.1038 / s41467-019-12759-5.
Alas emplumadas de ingeniería
Para demostrar una estrategia de locomoción más compleja que incluye estructuras biológicas adicionales con funciones críticas, el equipo desarrolló un emplumado, ala de pájaro musculoesquelético in silico. Los bioingenieros habían realizado previamente una variedad de estudios para comprender las características biofísicas del vuelo de las aves, desde los patrones de activación muscular hasta la biomecánica de las plumas. En el presente trabajo, Zhang y col. consideró la estructura dinámica del ala de una paloma y reconstruyó las plumas in silico con rigidez a la flexión, consistente con estudios previos.
En total, conectaron 19 plumas al modelo de ala computacional conforme a los datos biológicos de la paloma mensajera. Incluyeron cuatro músculos asociados con las articulaciones del hombro y el codo para controlar la actuación y la transformación del ala en relación con el modelo de la articulación del codo humano. Aunque este modelo, el primero en estudio, no capturó la aerodinámica compleja asociada con el vuelo con aleteo, proporcionó una estimación preliminar. El equipo reprodujo la cinemática de las alas cambiantes durante el despegue y basó los patrones de actuación muscular en señales de electromiografía (EMG) previamente adquiridas y registradas experimentalmente.
De este modo, Xiaotian Zhang y un equipo de investigadores presentaron un nuevo método para ensamblar heterogéneos, varillas cosserat activas y pasivas para simular dinámicas, arquitecturas musculoesqueléticas que pueden sufrir deformaciones para facilitar el movimiento biomimético. El enfoque abordó la falta existente de técnicas de ingeniería en robótica blanda para llenar el vacío entre el modelado de cuerpos rígidos y las simulaciones del método de elementos finitos (FEM) de alta fidelidad.
Usando características favorables desarrolladas en el estudio, El equipo de investigación diseñó sistemas de cuerpo blando para resolver una serie de problemas relacionados con la robótica blanda y las estructuras biológicas complejas en diversos entornos. El nuevo trabajo mostró la versatilidad del enfoque para establecer una estrategia prometedora para aplicaciones de amplio rango en estructuras de bioingeniería inspiradas biológicamente para descubrir las características subyacentes de los organismos vivos.
© 2019 Science X Network