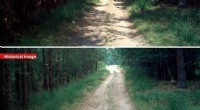
Un usuario manipula la formación de un enjambre de drones usando SwarmTouch. Crédito:Tsykunov et al.
Investigadores del Instituto de Ciencia y Tecnología Skolkovo (Skoltech) en Rusia han introducido recientemente una nueva estrategia para mejorar las interacciones entre humanos y enjambres robóticos. llamado SwarmTouch. Esta estrategia, presentado en un artículo publicado previamente en arXiv, permite que un operador humano se comunique con un enjambre de drones nano-quadrotor y guíe su formación, mientras recibe retroalimentación táctil en forma de vibraciones.
"Estamos trabajando en el campo del enjambre de drones y mi investigación anterior en el campo de la háptica fue muy útil para introducir una nueva frontera de interacciones táctiles entre humanos y enjambres". "Dzmitry Tsetserukou, Profesor en Skoltech y jefe del laboratorio de Robótica Espacial Inteligente, dijo a TechXplore. "Durante nuestros experimentos con el enjambre, sin embargo, entendimos que las interfaces actuales son demasiado hostiles y difíciles de operar ".
Al realizar investigaciones que investigan estrategias para la interacción humano-enjambre, Tsetserukou y sus colegas se dieron cuenta de que actualmente no hay interfaces disponibles que permitan a los operadores humanos desplegar fácilmente un enjambre de robots y controlar sus movimientos en tiempo real. En este momento, la mayoría de los enjambres simplemente siguen trayectorias predefinidas, que han sido establecidos por los investigadores antes de que los robots comiencen a funcionar.
La estrategia de interacción humano-enjambre propuesta por los investigadores, por otra parte, permite a un usuario humano guiar directamente los movimientos de un enjambre de robots nano-quadrotor. Lo hace considerando la velocidad de la mano del usuario y cambiando la forma o dinámica de formación del enjambre en consecuencia, utilizando interrelaciones de impedancia simuladas entre los robots para producir comportamientos que se asemejan a los de los enjambres que ocurren en la naturaleza.
El sistema ideado por los investigadores incluye una pantalla táctil portátil que entrega patrones de vibración en los dedos de un usuario para informarle de la dinámica actual del enjambre (es decir, si el enjambre se expande o se contrae). Estos patrones de vibración permiten a los usuarios humanos cambiar la dinámica del enjambre para que el enjambre pueda evitar obstáculos simplemente moviendo sus manos a diferentes velocidades o en diferentes direcciones.
El sistema detecta la posición de la mano del usuario mediante un sistema de captura de movimiento de alta precisión llamado Vicon Vantage V5. Además, el operador humano y los robots individuales en el enjambre están conectados a través de interconexiones de impedancia.
"Estos enlaces se comportan como muelles-amortiguadores, "Explicó Tsetserukou." Evitan que los drones vuelen cerca del operador y entre sí y que se pongan en marcha o se detengan abruptamente. Nuestra estrategia mejora considerablemente la seguridad de las interacciones entre humanos y enjambres y hace que los comportamientos del enjambre sean similares a los de los sistemas biológicos reales (por ejemplo, enjambres de abejas) ".
La ventaja clave de la estrategia de interacción humano-enjambre ideada por Tsetserukou y sus colegas es que permite a los usuarios experimentar el movimiento de un enjambre de robots directamente a través de la punta de sus dedos. También permite a los operadores cambiar la dinámica del enjambre en tiempo real, permitir que los robots naveguen por entornos desordenados y complejos, como centros urbanos llenos de rascacielos u otros obstáculos.
Las pruebas preliminares que evaluaron esta nueva estrategia de interacción táctil revelaron que los usuarios pueden comprender qué significan las vibraciones en la punta de sus dedos la mayor parte del tiempo. La mayoría de los participantes que participaron en estas pruebas sintieron que la sensación táctil mejoró su capacidad para guiar a los drones. al mismo tiempo que hacen que su comunicación con el enjambre sea más interactiva.
En el futuro, SwarmTouch, la estrategia desarrollada por Tsetserukou y sus colegas, podría usarse para entrenar enjambres a navegar en los almacenes, entregar mercancías en entornos urbanos e incluso inspeccionar puentes u otras infraestructuras. Los investigadores pronto presentarán otro enfoque, llamado CloakSwarm, en la conferencia ACM Siggraph Asia 2019.
También están trabajando en dos estrategias adicionales de interacción entre drones y humanos, SlingDrone y WiredSwarm, que se demostrará en la conferencia ACM VRST 2019. SlingDrone, la primera de estas estrategias, es un paradigma de realidad mixta que permite a los usuarios operar drones utilizando un controlador señalador de forma interactiva, produciendo un movimiento de tirachinas.
"Este enfoque es algo similar al popular juego para dispositivos móviles Angry Birds, pero con los usuarios tirando de un dron real con una cuerda en lugar de en una pantalla táctil, para navegar su trayectoria balística en la realidad virtual, "Tsetserukou explicó." SlingDrone te permite apuntar un dron virtual en la dirección en la que quieres que vuele y, al mismo tiempo, un dron real volará a la posición objetivo y te traerá el objeto que deseas agarrar. WiredSwarm, por otra parte, es un enjambre de drones que se sujetan a los dedos del usuario con correas, que puede proporcionar retroalimentación háptica de alta fidelidad a un usuario de realidad virtual. Llamamos a este nuevo tipo de interfaz la primera interfaz háptica portátil voladora ".
© 2019 Science X Network