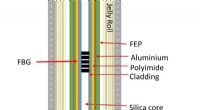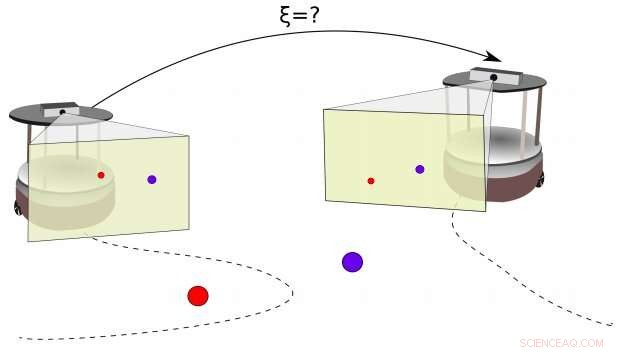
Una representación del problema abordado en el estudio reciente. Dos robots están observando un par de puntos 3D. Los investigadores proponen una tubería para estimar simultáneamente la profundidad 3D de los dos puntos 3D y obtener simultáneamente su pose relativa. Crédito:Rodrigues et al.
Investigadores de la Universidad de Oporto en Portugal y el Real Instituto de Tecnología KTH en Suecia han desarrollado recientemente un marco que puede estimar la profundidad y pose relativa de dos robots terrestres que colaboran en una tarea determinada. Su marco, descrito en un artículo publicado previamente en arXiv, podría ayudar a mejorar el rendimiento de varios robots en tareas que implican exploración, manipulación, cobertura, muestreo y patrullaje, así como en misiones de búsqueda y rescate.
En años recientes, Los investigadores han llevado a cabo un número creciente de estudios destinados a desarrollar soluciones para coordinar eficazmente varios robots dentro de una arquitectura descentralizada. Para abordar eficazmente una tarea determinada como grupo, Los robots individuales dentro de un enjambre o formación deben ser al menos parcialmente conscientes de la pose de otros agentes en su entorno.
Estos datos relacionados con la pose, conocida como información de pose relativa, permite a un agente optimizar la función de un objetivo determinado, Replanea sus trayectorias y evita colisiones con otros robots. En algunos entornos del mundo real, sin embargo, Puede ser difícil para los agentes obtener estimaciones de pose relativa precisas. Por ejemplo, durante misiones extremas en áreas remotas o aisladas, Los robots pueden encontrar problemas con los canales de comunicación y con los sistemas de captura de movimiento o posicionamiento de alta precisión.
Teniendo esto en cuenta, El equipo de investigadores de la Universidad de Porto y KTH se propuso desarrollar un marco que pudiera mejorar la estimación de profundidad en 3D y la estimación de pose relativa de robots terrestres que trabajan juntos hacia un objetivo común. Se centraron específicamente en un escenario que involucraba a dos vehículos terrestres autónomos que navegaban por un entorno desconocido. ambos equipados con cámaras de perspectiva.
Pipeline del marco propuesto por los investigadores. Crédito:Rodrigues et al.
"El problema de la estimación de profundidad tiene como objetivo recuperar la información 3-D del entorno, "explican los investigadores en su artículo." El problema de la localización relativa consiste en estimar la pose relativa entre dos robots, sintiendo la pose del otro o compartiendo información sobre el entorno percibido ".
La mayoría de las soluciones existentes para la estimación de profundidad y la localización relativa en robots funcionan analizando un conjunto de datos desconectado, sin tener en cuenta el orden cronológico de los acontecimientos. El enfoque propuesto por los investigadores, por otra parte, considera la información recopilada por los dos robots individualmente a través de sus cámaras y luego la combina para calcular la pose relativa entre ellos. La información de estimación de profundidad recopilada por los dos agentes y los comandos de entrada se envían a un filtro de Kalman extendido (EKF), que está diseñado para procesar estos datos y estimar la pose relativa entre los robots.
"Si bien las soluciones anteriores para este problema consideran un conjunto de dos o más imágenes del entorno o utilizan alguna configuración de flota especial (por ejemplo, los robots están en el campo de visión de los demás o tienen la capacidad de detectar la información de los rodamientos de los demás) posiciones), Proponemos un marco que comparte un conjunto de observaciones comunes del entorno en el marco local respectivo de cada robot (se emplean características de puntos 3-D), "escriben los investigadores.
Los investigadores evaluaron su marco en una serie de escenarios simulados, utilizando dos robots terrestres llamados TurtleBots. Sus hallazgos sugieren que su enfoque, de hecho, permite una estimación de profundidad efectiva y una localización relativa para dos robots que colaboran en una tarea. En su trabajo futuro, los investigadores planean considerar también el control activo de dos robots en el mismo escenario explorado en su estudio reciente, así como otros aspectos relevantes para su coordinación.
© 2019 Science X Network