Crédito:MIT
Hace años que, El profesor del MIT, Neil Gershenfeld, tuvo un pensamiento audaz. Impresionado por el hecho de que todos los seres vivos del mundo están formados por combinaciones de solo 20 aminoácidos, se preguntó:¿Será posible crear un kit de solo 20 piezas fundamentales que se puedan utilizar para ensamblar todos los diferentes productos tecnológicos del mundo?
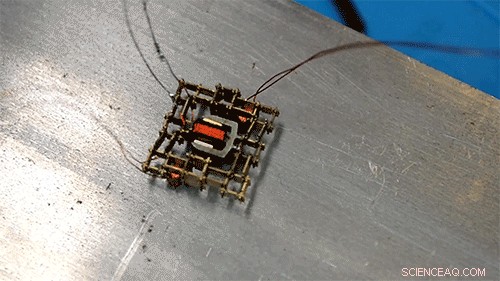
Gershenfeld y sus estudiantes han hecho un progreso constante en esa dirección desde entonces. Su último logro, presentado esta semana en una conferencia internacional de robótica, consta de un conjunto de cinco diminutas piezas fundamentales que se pueden ensamblar en una amplia variedad de dispositivos funcionales, incluyendo un pequeño motor "andante" que puede moverse hacia adelante y hacia atrás a través de una superficie o hacer girar los engranajes de una máquina.
Previamente, Gershenfeld y sus estudiantes demostraron que las estructuras ensambladas a partir de muchos pequeños, las subunidades idénticas pueden tener numerosas propiedades mecánicas. Próximo, demostraron que se puede utilizar una combinación de tipos de piezas rígidas y flexibles para crear alas de avión morphing, un objetivo de larga data en la ingeniería aeroespacial. Su último trabajo agrega componentes para el movimiento y la lógica, y será presentado en la Conferencia Internacional sobre Manipulación, Automatización y robótica a pequeña escala (MARSS) en Helsinki, Finlandia, en un artículo de Gershenfeld y el estudiante graduado del MIT Will Langford.
Su trabajo ofrece una alternativa a los enfoques actuales para la construcción de robots, que se clasifican en gran medida en uno de dos tipos:máquinas personalizadas que funcionan bien pero son relativamente caras e inflexibles, y reconfigurables que sacrifican el rendimiento por la versatilidad. En el nuevo enfoque, Langford ideó un conjunto de componentes a escala de cinco milímetros, todos los cuales se pueden unir entre sí mediante un conector estándar. Estas piezas incluyen los tipos rígidos y flexibles anteriores, junto con piezas electromagnéticas, una bobina, y un imán. En el futuro, el equipo planea fabricarlos con tipos de piezas básicas aún más pequeñas.
Crédito:MIT
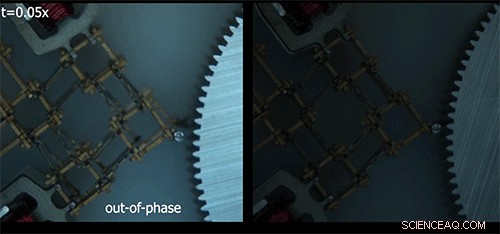
Usando este sencillo kit de piezas diminutas, Langford los ensambló en un nuevo tipo de motor que mueve un apéndice en pasos mecánicos discretos, que se puede utilizar para girar una rueda dentada, y una forma móvil del motor que convierte esos pasos en locomoción, permitiéndole "caminar" a través de una superficie de una manera que recuerda a los motores moleculares que mueven los músculos. Estas piezas también se pueden ensamblar en las manos para agarrar, o piernas para caminar, según sea necesario para una tarea en particular, y luego reensamblado a medida que cambian esas necesidades. Gershenfeld se refiere a ellos como "materiales digitales, "piezas discretas que se pueden unir de forma reversible, formando una especie de micro-LEGO funcional.
El nuevo sistema es un paso significativo hacia la creación de un kit estandarizado de piezas que podría usarse para ensamblar robots con capacidades específicas adaptadas a una tarea o conjunto de tareas en particular. Dichos robots especialmente diseñados se podrían desmontar y volver a montar según sea necesario en una variedad de formas, sin necesidad de diseñar y fabricar nuevos robots desde cero para cada aplicación.
El motor inicial de Langford tiene una capacidad similar a la de una hormiga para levantar siete veces su propio peso. Pero si se requieren mayores fuerzas, muchas de estas partes se pueden agregar para proporcionar más empuje. O si el robot necesita moverse de formas más complejas, estas partes podrían distribuirse por toda la estructura. El tamaño de los bloques de construcción se puede elegir para que coincida con su aplicación; el equipo ha fabricado piezas del tamaño de un nanómetro para fabricar nanorobots, y piezas del tamaño de un metro para hacer megarobots. Previamente, se necesitaban técnicas especializadas en cada uno de estos extremos de escala de tallas.
"Una aplicación emergente es hacer pequeños robots que puedan funcionar en espacios reducidos, ", Dice Gershenfeld. Algunos de los dispositivos ensamblados en este proyecto, por ejemplo, son más pequeños que un centavo pero pueden realizar tareas útiles.
Para construir en los "cerebros, "Langford ha agregado tipos de piezas que contienen circuitos integrados de tamaño milimétrico, junto con algunos otros tipos de piezas para encargarse de conectar señales eléctricas en tres dimensiones.
La sencillez y regularidad de estas estructuras hace que sea relativamente fácil automatizar su montaje. Para hacer eso, Langford ha desarrollado una máquina novedosa que es como un cruce entre una impresora 3D y las máquinas de recoger y colocar que fabrican circuitos electrónicos. pero a diferencia de cualquiera de esos, éste puede producir sistemas robóticos completos directamente a partir de diseños digitales. Gershenfeld dice que esta máquina es un primer paso hacia el objetivo final del proyecto de "hacer un ensamblador que pueda ensamblarse a sí mismo con las piezas que está ensamblando".
"La estandarización es un tema extremadamente importante en microrobótica, para reducir los costos de producción y, como resultado, para mejorar la aceptación de esta tecnología al nivel de los robots industriales regulares, "dice Sergej Fatikow, jefe de la División de Microrrobótica e Ingeniería de Control, en la Universidad de Oldenburg, Alemania, que no estuvo asociado con esta investigación. El nuevo trabajo "aborda el ensamblaje de sofisticados sistemas microrobóticos a partir de un pequeño conjunto de bloques de construcción estándar, que puede revolucionar el campo de la microrrobótica y abrir numerosas aplicaciones a pequeña escala, " él dice.
Esta historia se vuelve a publicar por cortesía de MIT News (web.mit.edu/newsoffice/), un sitio popular que cubre noticias sobre la investigación del MIT, innovación y docencia.