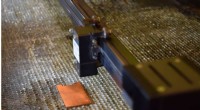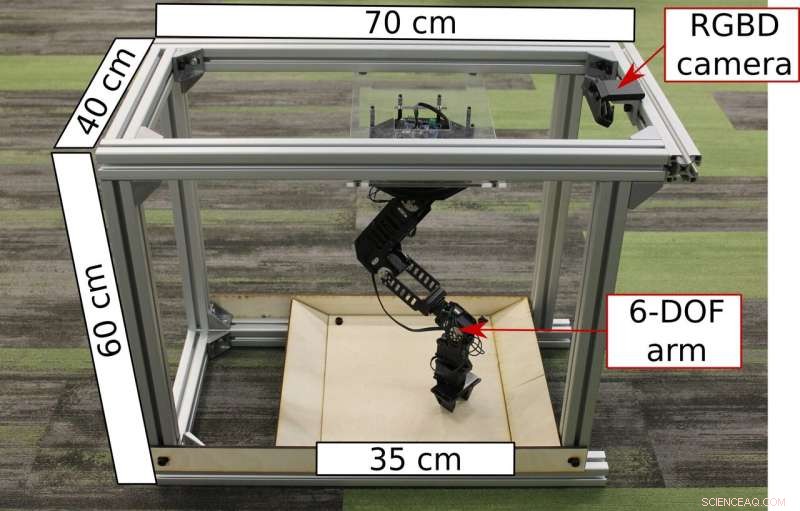
Un primer plano de la celda REPLAB con anotaciones. Crédito:Yang et al.
Los investigadores de UC Berkeley han desarrollado un plataforma compacta y de bajo costo para evaluar enfoques de aprendizaje robótico, al que llamaron REPLAB. Su estudio reciente, presentado en un artículo publicado previamente en arXiv, fue apoyado por Berkeley DeepDrive, la Oficina de Investigación Naval (ONR), Google, NVIDIA y Amazon.
"Los enfoques basados en el aprendizaje automático han comenzado a popularizarse en robótica recientemente, pero actualmente no existe una manera fácil de comparar enfoques debido a las grandes diferencias en las configuraciones de hardware utilizadas en varios laboratorios, "Brian Yang, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Por ejemplo, en la comprensión de la investigación, todo, desde el tipo de brazo o pinza hasta el material del que está hecha la pinza, afecta el rendimiento de agarre, por lo que incluso si obtiene una mejor precisión de comprensión que con un método del año pasado, no está claro si se debe a un mejor control o simplemente a un mejor hardware ".
En años recientes, Ha habido una necesidad creciente de medidas estandarizadas y plataformas de referencia para evaluar los enfoques de aprendizaje automático para la robótica. Establecer puntos de referencia efectivos a veces puede ser un desafío, particularmente para el aprendizaje de robótica, donde se espera que los robots generalicen modelos aprendidos a nuevos objetos y situaciones. La nueva plataforma de referencia desarrollada en UC Berkeley proporciona una solución de bajo costo y fácilmente reproducible para probar enfoques robóticos de manipulación de objetos.
"Otras aplicaciones del aprendizaje automático, como la visión por computadora y el procesamiento del lenguaje natural, se han beneficiado enormemente de tener conjuntos de datos y puntos de referencia, a medida que impulsan el enfoque de la investigación en problemas importantes, proporcionar una forma de trazar el progreso de una comunidad de investigación, y ayudar a identificar rápidamente, diseminar, y mejorar las ideas que funcionan bien, "Dinesh Jayaraman, otro investigador involucrado en el estudio, dijo a TechXplore. "Diseñamos REPLAB para cumplir esta función para la comunidad de investigación de aprendizaje de robots".
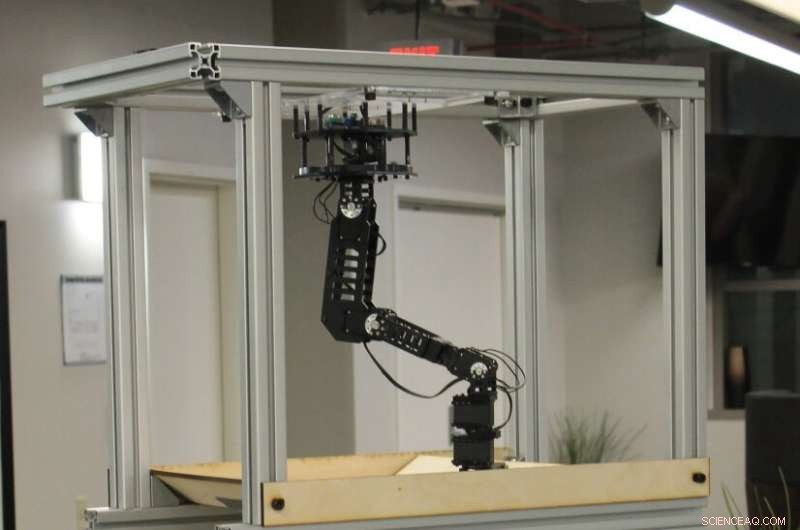
Dos celdas REPLAB apiladas una encima de la otra. Crédito:Yang et al.
REPLAB tiene varios componentes, incluyendo un brazo robótico, una cámara y un espacio de trabajo, colocado en un espacio cuboide de 70 x 40 x 60cm. La plataforma cuesta aproximadamente $ 2000 para construir y se puede ensamblar en unas pocas horas. Su diseño compacto y de bajo costo podría permitir a más investigadores, incluso aquellos con un presupuesto limitado, para evaluar sus marcos y enfoques.
"REPLAB es una plataforma de hardware totalmente estandarizada para la manipulación robótica diseñada con una fácil adopción en mente, ", Explicó Jayaraman." Contiene un solo brazo de bajo costo (Trossen WidowX), una cámara RGB-D (Intel Realsense SR300) y un estándar, Espacio de trabajo compacto que es fácil de montar en unas pocas horas siguiendo nuestras instrucciones de montaje. Todo junto una celda REPLAB completa cuesta alrededor de 2000 USD (en comparación con las configuraciones de brazo estándar que cuestan entre 40 y 50000 USD), ocupando aproximadamente 10 veces menos espacio que una configuración de brazo estándar ".
Además de la propia plataforma, los investigadores propusieron una plantilla para un punto de referencia comprensivo que incluye una definición de tareas y un protocolo de evaluación, medidas de desempeño y un conjunto de datos de 92, 000 intentos de agarre. Las líneas de base para este punto de referencia se establecieron a través de la implementación, evaluación y análisis de varios enfoques de agarre existentes.
"Como tenemos esta plataforma de hardware estandarizada, también podemos compartir un paquete de software de código abierto con implementaciones de varios algoritmos de aprendizaje de robots (hasta ahora, algoritmos de aprendizaje supervisado para la comprensión y algoritmos de aprendizaje reforzado para alcanzar puntos en 3-D), "Dijo Jayamaran." Si construyes tu propia celda REPLAB, puede descargar una imagen de Docker que contenga estas implementaciones y ejecutarlas listas para usar en su celular ".
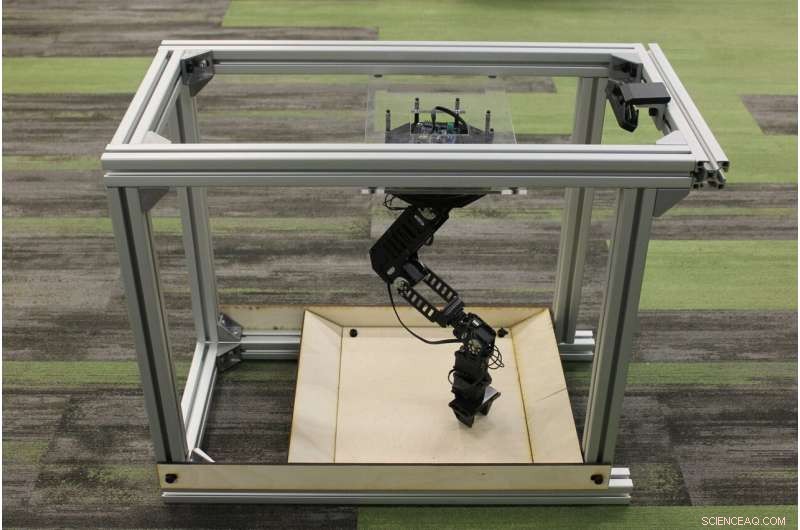
Una celda REPLAB sin anotaciones. Crédito:Yang et al.
Hasta aquí, los investigadores han llevado a cabo principalmente evaluaciones destinadas a verificar la viabilidad de REPLAB como plataforma para la investigación reproducible en el aprendizaje de la robótica, centrándose en dos tareas particulares:agarrar y alcanzar un punto en 3D. En otras palabras, han utilizado su plataforma para implementar y evaluar múltiples enfoques de aprendizaje supervisado profundo para estas tareas de comprensión en particular. Sus hallazgos sugieren que la plataforma expone los algoritmos existentes a desafíos poco estudiados que son cruciales para el desarrollo de robots que funcionan bien en la naturaleza. como una actuación ruidosa.
"También hemos verificado que los resultados se mantienen consistentes en múltiples celdas REPLAB, lo cual es importante para pensar en las implementaciones y evaluaciones de algoritmos basados en REPLAB como reproducibles, ", Dijo Jayamaran." Creemos que REPLAB facilitará métricas de progreso consistentes y reproducibles para el aprendizaje de robots, Reducir la barrera de entrada a la robótica para investigadores en disciplinas relacionadas como el aprendizaje automático. y fomentar el código y los datos que se pueden compartir entre los investigadores ".
La nueva plataforma presentada por Yang, Jayaraman y sus colegas pronto podrían permitir que más investigadores evalúen enfoques para una amplia gama de tareas de manipulación. Al igual que otras plataformas de benchmank, sin embargo, para tener éxito, el uso de REPLAB debería involucrar a la comunidad de investigación de aprendizaje de robots en general.
"Si bien invertimos en el mantenimiento de la plataforma durante muchos años, estamos invitando contribuciones de la comunidad, como nuevas implementaciones de algoritmos, conjuntos de datos, y puntos de referencia y a nuestra plataforma de código abierto, ", Dijo Jayaraman." La gran visión es llegar a un punto en el que, si se lanza un nuevo algoritmo de aprendizaje de robots de última generación, un investigador que se encuentre en cualquier parte del mundo podría descargar, evaluar, iterar y mejorar una implementación en unos pocos días. Creemos que REPLAB ayuda a acelerar la investigación al hacer dos cosas:reducir la barrera de entrada y permitir que muchas más personas participen en investigaciones de vanguardia. y permitiendo este tipo de iteración y mejora rápidas mediante el uso compartido de código ".
En su trabajo futuro, los investigadores de UC Berkeley planean seguir desarrollando su plataforma, agregando un simulador de celda REPLAB completo y algoritmos para un control robusto, al mismo tiempo que aborda nuevos desafíos de manipulación. También esperan ampliar el repositorio oficial de REPLAB github y la imagen de la ventana acoplable, incluyendo implementaciones de algoritmos más avanzados.
© 2019 Science X Network