La punta del catéter constaba de un sensor de visión háptica hecho de una cámara de escala milimétrica y un LED recubierto de silicona. Crédito:Fagogenis et al., Sci. Robot. 4, eaaw1977 (2019)
Los bioingenieros del Boston Children's Hospital informan de la primera demostración de un robot capaz de navegar de forma autónoma dentro del cuerpo. En un modelo animal de reparación de válvulas cardíacas, el equipo programó un catéter robótico para encontrar su camino a lo largo de las paredes de una paliza, corazón lleno de sangre a una válvula con fugas, sin la guía de un cirujano. Informan de su trabajo hoy en Ciencia Robótica .
Los cirujanos han utilizado robots operados por joysticks durante más de una década, y los equipos han demostrado que los pequeños robots pueden conducirse a través del cuerpo mediante fuerzas externas como el magnetismo. Sin embargo, investigador senior Pierre Dupont, Doctor., jefe de Bioingeniería Cardíaca Pediátrica en Boston Children's, dice que a su conocimiento, este es el primer informe del equivalente a un automóvil autónomo que navega hacia un destino deseado dentro del cuerpo.
Dupont prevé robots autónomos que ayuden a los cirujanos en operaciones complejas, reducir la fatiga y liberar a los cirujanos para que se concentren en las maniobras más difíciles, mejorar los resultados.
"La forma correcta de pensar en esto es a través de la analogía de un piloto de combate y un avión de combate, ", dice." El avión de combate asume las tareas de rutina como volar el avión, para que el piloto pueda concentrarse en las tareas de mayor nivel de la misión ".
Visión guiada por tacto, informado por AI
El catéter robótico del equipo navegó utilizando un sensor táctil óptico desarrollado en el laboratorio de Dupont, informado por un mapa de la anatomía cardíaca y exploraciones preoperatorias. El sensor táctil utiliza inteligencia artificial (IA) y algoritmos de procesamiento de imágenes para permitir que el catéter descubra dónde está en el corazón y hacia dónde debe ir.
Para la demostración, el equipo realizó un procedimiento técnicamente muy exigente conocido como cierre de fuga aórtica paravalvular, que repara válvulas cardíacas de reemplazo que han comenzado a gotear alrededor de los bordes. (El equipo construyó sus propias válvulas para los experimentos). Una vez que el catéter robótico llegó a la ubicación de la fuga, un cirujano cardíaco experimentado tomó el control e insertó un tapón para cerrar la fuga.
En ensayos repetidos, el catéter robótico navegó con éxito hasta las fugas de la válvula cardíaca en aproximadamente la misma cantidad de tiempo que el cirujano (utilizando una herramienta manual o un robot controlado por joystick).
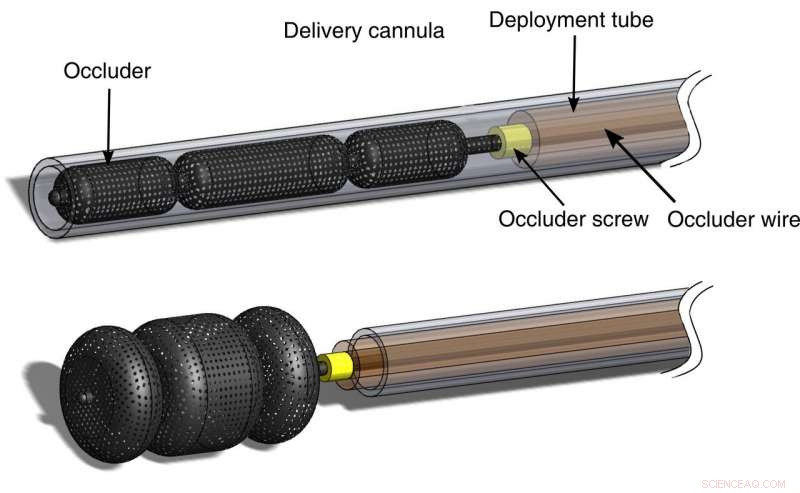
Un diagrama del sistema de despliegue del oclusor. Crédito:Fagogenis et al., Sci. Robot. 4, eaaw1977 (2019)
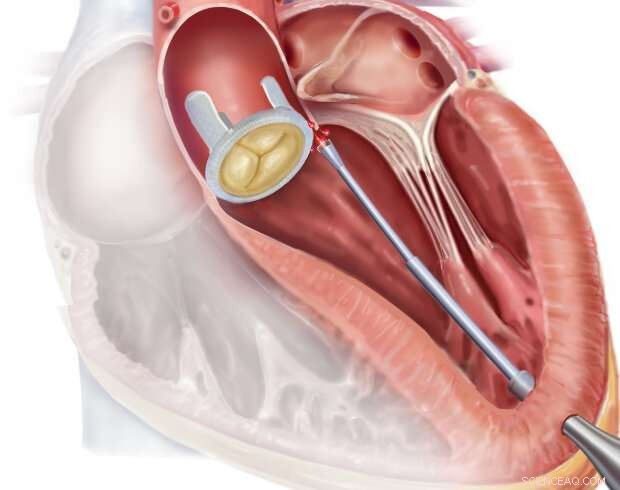
Ilustración de la navegación con catéter robótico al sitio de la válvula protésica con fuga. Crédito:Fagogenis et al., Sci. Robot. 4, eaaw1977 (2019)

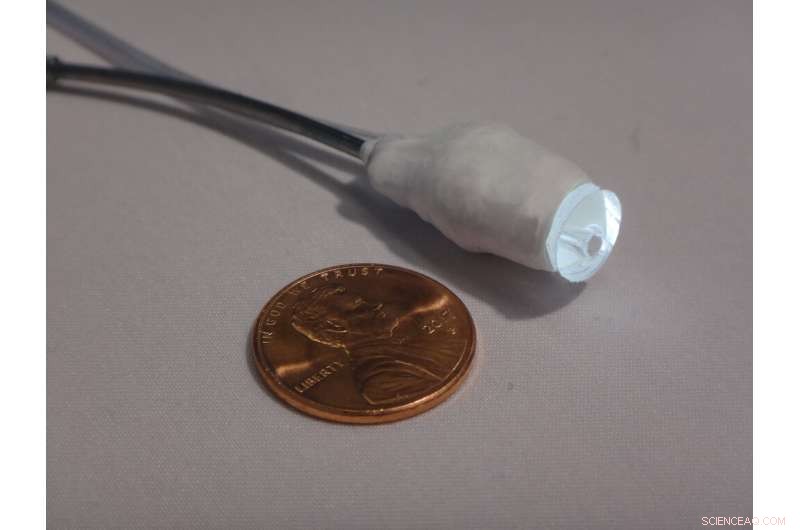
Herramienta de detección de fuerza conectada al catéter. Crédito:Fagogenis et al., Sci. Robot. 4, eaaw1977 (2019)
Navegación de inspiración biológica
Mediante una técnica de navegación llamada "seguimiento de paredes, "el sensor táctil óptico del catéter robótico muestreaba su entorno a intervalos regulares, en gran parte de la forma en que las antenas de los insectos o los bigotes de los roedores muestrean su entorno para construir mapas mentales de lo desconocido, ambientes oscuros. El sensor le dijo al catéter si estaba tocando sangre, la pared del corazón o una válvula (a través de imágenes de una cámara montada en la punta) y qué tan fuerte estaba presionando (para evitar que dañara el corazón que latía).
Los datos de los algoritmos de aprendizaje automático e imágenes preoperatorias ayudaron al catéter a interpretar las características visuales. De este modo, el catéter robótico avanzó por sí mismo desde la base del corazón, a lo largo de la pared del ventrículo izquierdo y alrededor de la válvula con fugas hasta que alcanza la ubicación de la fuga.
"Los algoritmos ayudan al catéter a determinar qué tipo de tejido está tocando, donde esta en el corazon, y cómo debe elegir su próximo movimiento para llegar a donde queremos que vaya, "Explica Dupont.
Aunque el robot autónomo tardó un poco más que el cirujano en alcanzar la válvula con fugas, su técnica de seguimiento de la pared significó que tomó el camino más largo.
"El tiempo de navegación fue estadísticamente equivalente para todos, lo cual creemos que es bastante impresionante dado que estás dentro del corazón latiendo lleno de sangre y tratando de alcanzar un objetivo de escala milimétrica en una válvula específica, "dice Dupont.
Agrega que la capacidad del robot para visualizar y sentir su entorno podría eliminar la necesidad de imágenes fluoroscópicas. que se usa típicamente en esta operación y expone a los pacientes a la radiación ionizante.
¿Una visión del futuro?
Dupont dice que el proyecto fue el más desafiante de su carrera. Mientras que el compañero de cirugía cardíaca, quien realizó las operaciones en cerdos, pudo relajarse mientras el robot encontraba la válvula con fugas, el proyecto era agotador para los becarios de ingeniería de Dupont, que a veces tenían que reprogramar el robot en mitad de la operación a medida que perfeccionaban la tecnología.
"Recuerdo momentos en que los ingenieros de nuestro equipo salieron del quirófano completamente agotados, pero logramos llevarlo a cabo, ", dice Dupont." Ahora que hemos demostrado la navegación autónoma, mucho más es posible ".
Algunos intervencionistas cardíacos que conocen el trabajo de Dupont imaginan el uso de robots para algo más que la navegación, realizar tareas rutinarias de cartografía del corazón, por ejemplo. Algunos imaginan que esta tecnología proporcionará orientación durante casos particularmente difíciles o inusuales o que ayudará en operaciones en partes del mundo que carecen de cirujanos altamente experimentados.
A medida que la Administración de Alimentos y Medicamentos comienza a desarrollar un marco regulatorio para dispositivos habilitados para IA, Dupont prevé la posibilidad de que los robots quirúrgicos autónomos de todo el mundo agrupen sus datos para mejorar continuamente el rendimiento a lo largo del tiempo, al igual que los vehículos autónomos en el campo envían sus datos a Tesla para refinar sus algoritmos.
"Esto no solo nivelaría el campo de juego, lo levantaría, ", dice Dupont." Todos los médicos del mundo operarían a un nivel de habilidad y experiencia equivalente al mejor en su campo. Ésta siempre ha sido la promesa de los robots médicos. La autonomía puede ser lo que nos lleve allí ".