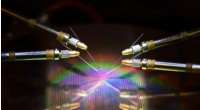
SwRI y ROS-Industrial integraron la reconstrucción inteligente de piezas dentro del marco ROS2 para mejorar la percepción de imágenes 3D de robótica industrial para la planificación de rutas con operaciones densas de puntos de paso, como el lijado de piezas. Crédito:Southwest Research Institute
Southwest Research Institute y ROS-Industrial desarrollaron una solución que permite a los robots industriales escanear y manipular objetos metálicos que anteriormente eran demasiado "brillantes" para que los procese la visión artificial.
El proyecto integra la reconstrucción inteligente de piezas utilizando la segunda generación del marco del Sistema Operativo de Robot (ROS2) para mejorar la percepción de imágenes en 3-D cuando los robots lijan y terminan las piezas de forma autónoma. Vea una demostración en el stand No. 8214 de SwRI en Automate en Chicago del 8 al 11 de abril.
"Este es un gran estudio de caso sobre los beneficios y desafíos de integrar ROS2 en robótica industrial, "dijo Matt Robinson, un gerente de SwRI que apoya a ROS-Industrial. "También muestra cómo los algoritmos de percepción avanzados pueden permitir escaneo más confiable de objetos metálicos ".
Los consorcios ROS-Industrial aprovechan ROS para crear ROS-I, una forma industrial del software de código abierto utilizado por los principales fabricantes de todo el mundo.
La última solución ROS-I utiliza ROS2 para integrar cámaras fijadas a un brazo robótico, recopilar datos de nubes de puntos a una alta velocidad de fotogramas para crear una malla de salida 3-D que optimiza la planificación de rutas. Históricamente, las cámaras y los algoritmos de visión artificial han tenido problemas para generar imágenes tridimensionales precisas de objetos metálicos debido al "ruido visual" que se dispersa en las superficies altamente reflectantes. Este importante desafío limita la automatización de los procesos de soldadura y acabado de superficies en la fabricación aeroespacial y automotriz.
SwRI, en colaboración con ROS-Industrial, supera este desafío integrando algoritmos de campo de distancia de signo truncado que unen varias imágenes, o nubes de puntos, a un ritmo mayor. La solución usa TrajOpt, o optimización de la trayectoria para la planificación del movimiento, dentro del marco ROS-Industrial Scan-N-Plan, para permitir la planificación de trayectorias en tiempo real a partir de datos de escaneo 3D.
Robinson dijo que el proyecto también subraya los beneficios de un enfoque basado en ROS, ya que esta solución es independiente del hardware. Los sensores y el robot se pueden cambiar con relativamente poco esfuerzo. ROS-Industrial, conocido por su interoperabilidad de código abierto, proporciona a los fabricantes controladores de software estándar para efectores finales y hardware de movimiento de motor fino que normalmente utiliza software ROS anterior.
"Este proyecto fue, en última instancia, un puente exitoso de ROS a ROS2, ", Dijo Robinson." Pero sabemos que será una gran tarea avanzar hacia ROS2, ya que muchos paquetes y capacidades dependientes todavía están en ROS ".
SwRI inició el desarrollo de ROS-Industrial en 2012 a través de un programa de investigación interno de SwRI realizado con colaboradores de la industria. SwRI mantiene el repositorio de software ROS-Industrial y administra el ROS-Industrial Consortium.
Los consorcios ROS-Industrial, con sucursales en las Américas, Europa, y ahora Asia:proporciona investigación y desarrollo aplicados con costos compartidos para la automatización avanzada de fábricas. Los miembros de los consorcios impulsan nuevas capacidades en ROS-I al defender proyectos técnicos enfocados en función de sus requisitos de automatización a corto plazo.