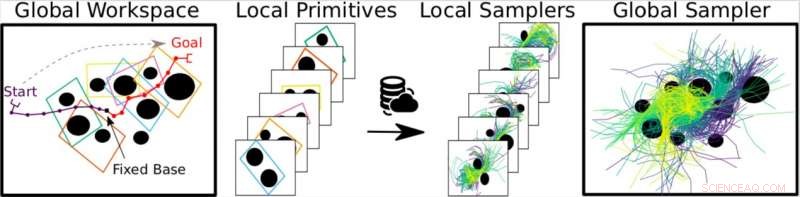
Una ilustración del marco propuesto en un manipulador plano. Crédito:Chamzas, Shrivastava y Kavraki.
Mientras que los humanos pueden ejecutar movimientos de forma natural e instantánea, Los robots requieren estrategias avanzadas de planificación del movimiento para poder navegar por su entorno. La planificación del movimiento es, por tanto, un área clave de la investigación en robótica, destinado a desarrollar herramientas y técnicas que permitan a los robots operar de forma autónoma en una variedad de entornos.
Si bien los estudios anteriores han introducido una variedad de técnicas de planificación de movimiento, más notablemente algoritmos basados en muestreo, la mayoría de ellos no funcionan de manera óptima en todos los entornos. Una limitación clave de muchos de estos enfoques es que se aproximan a la conectividad de espacios de alta dimensión con una pequeña cantidad de muestras, lo que dificulta su desempeño en escenarios donde las áreas necesarias para la conectividad del espacio tienen baja probabilidad de ser muestreadas. Esto se conoce comúnmente como el "problema de los pasajes estrechos".
Para abordar las limitaciones de los métodos de planificación de movimiento existentes, investigadores de la Universidad de Rice, en Texas, han desarrollado un nuevo enfoque que descompone el espacio de trabajo en primitivas locales, memorizar sus experiencias locales en forma de muestreadores locales y almacenarlos en una base de datos. Su método, descrito en un artículo publicado previamente en arXiv, es principalmente una prueba de concepto, ya que hasta ahora solo se ha probado en un entorno geométrico bastante simplificado. Sin embargo, el trabajo de estos investigadores tiene el potencial de resolver algunos desafíos clave encontrados en la investigación de planificación de movimiento.
"Nuestro estudio se centró únicamente en el problema de planificación del movimiento geométrico, "Constantinos Chamzas, uno de los investigadores que realizó el estudio, dicho TechXplore . "En una palabra, tienes un robot y algunos obstáculos y quieres encontrar un camino para mover tu robot del punto A al punto B sin chocar con los obstáculos ".
Además de estas capacidades generales de planificación de movimiento, en escenarios de la vida real (por ejemplo, mientras realiza tareas domésticas), un robot también debe resolver consultas de planificación de movimiento que se repiten continuamente. La mayoría de los enfoques de planificación de movimiento existentes obligan a los robots a completar tareas de la vida real resolviendo nuevas consultas desde cero, incluso si una consulta nueva se parece a una que se completó correctamente en el pasado.

Ejemplo de un robot que recoge cilindros de una estantería, que es una tarea con consultas de planificación de movimientos repetitivos. Crédito:Chamzas, Shrivastava y Kavraki.
Por lo tanto, los investigadores están tratando de desarrollar nuevas técnicas que utilicen las soluciones de planes de movimiento anteriores para informar la búsqueda de una solución a una nueva consulta de planificación de movimiento similar. El enfoque ideado por Chamzas y sus colegas logra esto mediante el uso de conocimientos previos relacionados con el medio ambiente que se dirige específicamente a pasajes estrechos previamente encontrados para adaptar su estrategia de muestreo al problema en cuestión.
"Durante el entrenamiento, el método propuesto divide el problema dado en subproblemas más fáciles, resolviendo cada uno de forma individual, y luego almacena estas sub-soluciones en una base de datos en forma de distribuciones de muestreo, ", Explicó Chamzas." Cuando surge un nuevo problema de planificación, el problema global se descompone nuevamente en locales, y nuestro método recupera las distribuciones muestrales relevantes que corresponden a las locales para crear una distribución muestral global que guía la búsqueda de manera mucho más informativa ".
Esencialmente, el enfoque de planificación de movimiento ideado por Chamzas y sus colegas divide un problema en subproblemas, combinando métodos tradicionales de bases de datos con muestreo informado. Esto lo distingue de los enfoques existentes, que normalmente utilizan una base de datos con soluciones precalculadas que se reparan en tiempo de ejecución o utilizan modelos que intentan inferir una buena distribución de muestreo para un entorno determinado.
"Las dos contribuciones principales de nuestro estudio son que ciertos problemas, que antes eran prácticamente imposibles de resolver con métodos tradicionales, se puede resolver descomponiendo y que el uso de esta combinación de bases de datos / muestreo es más efectivo en ciertos casos que otros métodos, "Dijo Chamzas.
Hasta aquí, los investigadores han evaluado su método en pruebas preliminares con primitivas geométricas simples. Los resultados son prometedores, ya que su método les permitió resolver problemas que los enfoques anteriores no pudieron resolver o resolvieron muy mal.
En el futuro, el enfoque propuesto por Chamzas y sus colegas podría ayudar a superar algunas de las limitaciones de los enfoques de planificación de movimiento existentes, permitiendo a los robots transferir conocimientos previamente adquiridos a diferentes entornos y mejorando así su rendimiento. Los investigadores ahora planean aplicar el mismo enfoque en entornos geométricos más complicados. También les gustaría explorar formas en las que su método podría aprender las distribuciones de muestreo, en lugar de adaptarlos a soluciones más antiguas.
© 2019 Science X Network