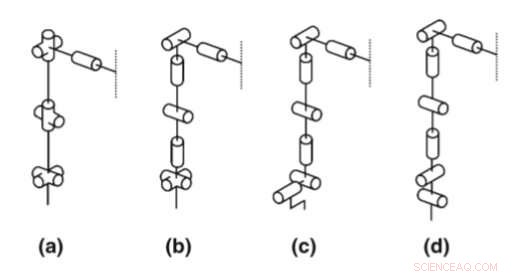
Visualización de la configuración de la articulación del brazo derecho de varios robots con 7 brazos DOF. La línea de puntos representa la línea media del cuerpo. un ASIMO, b ARMAR-III, c WABIAN-2, d Crédito iCub:Van de Perre et al.
Los robots sociales están diseñados para comunicarse con los seres humanos de forma natural, ayudándoles con una variedad de tareas. El uso efectivo de gestos podría mejorar en gran medida las interacciones robot-humano, Permitir que los robots se comuniquen tanto verbalmente como no verbalmente.
El diseño de la mayoría de los robots sociales está inspirado en el cuerpo humano, ya que esto facilita la reproducción de gestos y comportamientos similares a los humanos. Sin embargo, diferentes robots pueden tener diferentes morfologías, que les permiten abordar mejor las tareas para las que están diseñados.
Investigadores de la Vrije Universiteit Brussel, en Belgica, Recientemente han introducido un nuevo enfoque basado en un método de gestos genérico para estudiar la influencia de diferentes aspectos del diseño. Su papel publicado en Springer's Revista Internacional de Robótica Social , presenta un marco que genera rápidamente gestos que coinciden con la configuración específica de un robot.
"En este papel, proponemos una metodología novedosa para estudiar la influencia de diferentes aspectos del diseño a partir de un método genérico de gestos, "escribieron los investigadores en su artículo." El método de gestos se desarrolló para superar las dificultades de transferir gestos a diferentes robots, proporcionando una solución al problema de la correspondencia ".
El método ideado por este equipo de investigadores podría superar las dificultades para transferir gestos a robots de diferentes formas y configuraciones. Los usuarios pueden ingresar la información morfológica de un robot y la herramienta utilizará estos datos para calcular los gestos de ese robot.
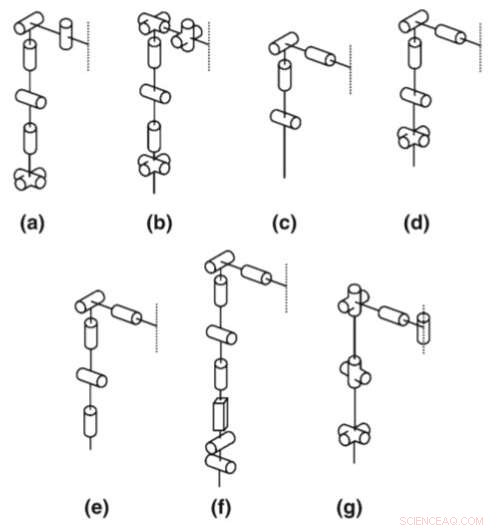
Visualización de la configuración de la articulación del brazo derecho de varios robots con diferentes morfologías de brazo. La línea de puntos representa la línea media del cuerpo. un Pyrène, b WE-4RII, c Robovie, d KHR-3, e NAO, f R1, g ARMAR-IV. Crédito:Van de Perre et al.
"Un pequeño conjunto de información morfológica, ingresado por el usuario, se utiliza para evaluar el marco genérico del software en tiempo de ejecución, "explicaron los investigadores." Por lo tanto, Los gestos se pueden calcular rápida y fácilmente para una configuración de robot deseada. Al generar un conjunto de gestos para diferentes morfologías, se puede estudiar la importancia de articulaciones específicas y su influencia en una serie de posturas y gestos ".
Para asegurarse de que su método sea aplicable a diferentes tipos de robots, los investigadores se inspiraron en un modelo de base humana. Este modelo consta de diferentes cadenas y bloques, que se utilizan para modelar las diversas posibilidades de rotación de los seres humanos. Los investigadores asignaron un marco de referencia a cada bloque de articulaciones utilizando el modelo de base humana como referencia para construir el marco general detrás de su método.
"Para generar gestos para un determinado modelo de robot, el método utiliza los parámetros Denavit-Hartenberg (DH) de la configuración como entrada, mediante el cual las diferentes articulaciones del robot se agrupan en cadenas y bloques del modelo base humano, ", explicaron los investigadores en su artículo." En tiempo de ejecución, el marco genérico del método se evalúa utilizando esta información, y como tal, adaptado al robot en cuestión ".
Dado que diferentes funciones son importantes para diferentes tipos de gestos, el método ideado por los investigadores está diseñado para funcionar en dos modos diferentes, a saber, el modo de bloque y el modo de efector final. El modo de bloqueo se utiliza para calcular gestos como expresiones emocionales en casos en los que la ubicación general del brazo es crucial. El modo efector final, por otra parte, calcula gestos en situaciones en las que la posición del efector final es importante, como durante la manipulación de objetos o al señalar.
"El método de gestos demuestra su utilidad en el proceso de diseño de robots sociales al proporcionar una impresión de la cantidad necesaria de complejidad necesaria para una tarea específica, y puede brindar información interesante sobre el rango de ángulo de articulación requerido, ", dijeron los investigadores.
En su estudio, los investigadores aplicaron su método al modelo virtual de un robot llamado Probo. Utilizaron este ejemplo para ilustrar cómo su método podría ayudar a estudiar la colocación de diferentes articulaciones y rangos de ángulos de articulaciones en gestos. En el futuro, su enfoque podría ayudar al desarrollo de robots sociales que puedan realizar gestos naturales adecuados a su morfología y aplicación.
© 2019 Science X Network