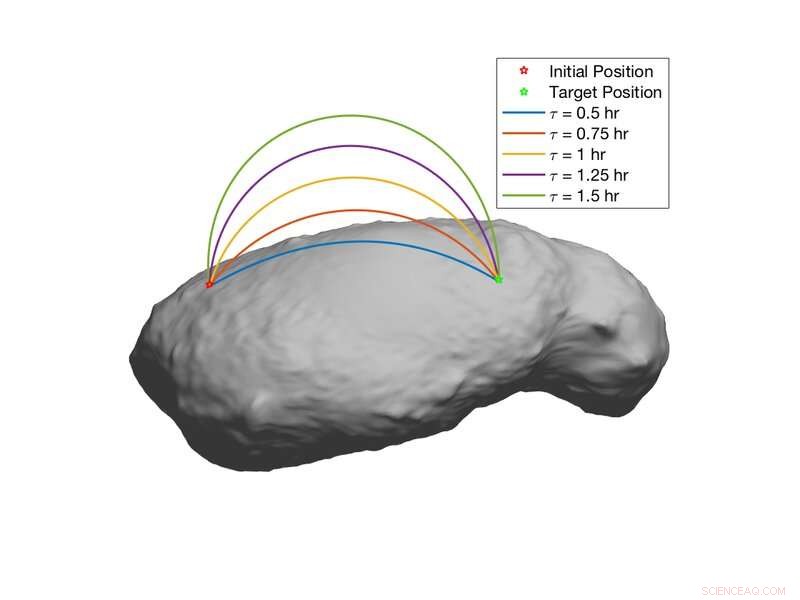
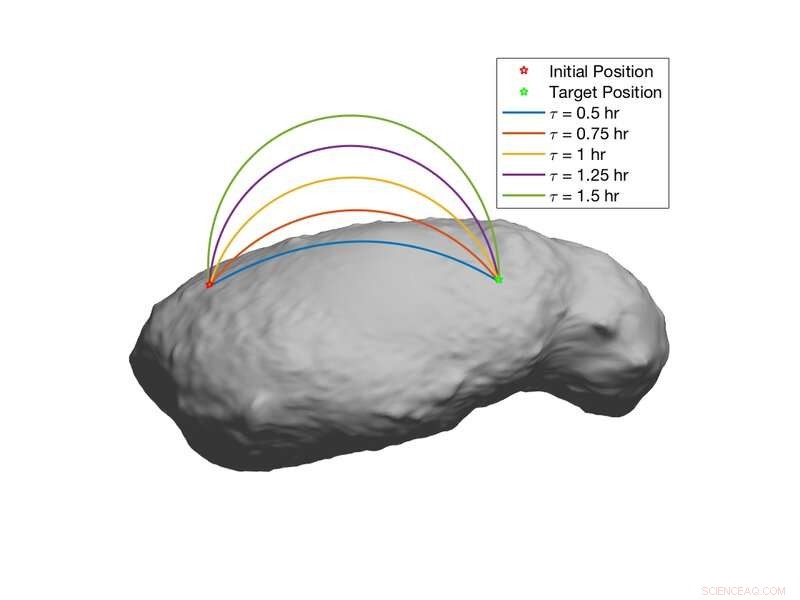
Saltando trayectorias desde la ubicación inicial a una ubicación de destino en la superficie de Itokawa. Crédito:Kalita y Thangavelautham.
Los asteroides son pequeños, cuerpos rocosos que orbitan alrededor del sol que son demasiado pequeños para ser llamados planetas. Hay millones de asteroides en el sistema solar, variando en tamaño, forma y composición. La exploración de asteroides podría ayudar a descubrir información fascinante sobre el origen del sistema solar, del planeta Tierra, y de la vida misma.
Los asteroides también podrían servir como puntos estratégicos para la ciencia planetaria, minería de recursos, relés de comunicación o defensa planetaria. Hasta aquí, sin embargo, Explorar las superficies de los asteroides ha demostrado ser un gran desafío debido a su campo de gravedad bajo y altamente no lineal.
Misiones recientes de asteroides, como Hayabusa II y OSIRIS-Rex eran simplemente operaciones de sobrevuelo o toque y marcha. Por lo tanto, los investigadores han estado tratando de desarrollar tecnología que permita la exploración de superficies de asteroides, por ejemplo, utilizando instrumentos in situ para analizar su composición y material subterráneo.
Los robots saltarines podrían ser particularmente útiles para la exploración de tales superficies, ya que la movilidad a través del salto balístico tiene varias ventajas en presencia de campos de gravedad irregulares. Estos tipos de robots pueden atravesar grandes distancias sobre terrenos accidentados, con gasto energético limitado. Un equipo de investigadores de la Universidad de Arizona ha desarrollado recientemente una dinámica de salto balístico y un nuevo enfoque para la planificación del movimiento en superficies de asteroides.
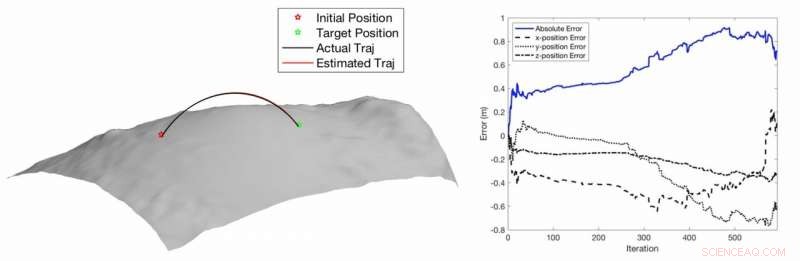
Autolocalización mediante la coincidencia de escaneo de nube de puntos 3D. Crédito:Kalita y Thangavelautham.
"A diferencia de la Tierra, la gravedad del asteroide es baja, como tales vehículos de salto son más adecuados, ya que pueden atravesar grandes distancias sobre un terreno arbitrariamente accidentado con el gasto de poca energía, "Himangshu Kalita, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Sin embargo, su forma irregular da como resultado un campo de gravedad muy irregular, lo que hace que saltar sea muy incierto. Por lo tanto, Se requiere una arquitectura secuencial para la autonomía de los rovers de salto que pueda planificar con anticipación antes de ejecutar cualquier salto y, al mismo tiempo, localizarse a sí mismo ".
El enfoque ideado por Kalita y su colega Jekan Thanga calcula la velocidad requerida para interceptar un objetivo y luego localiza el robot que salta. Para localizar el robot, los investigadores emplearon métodos de estimación de pose basados en coincidencias de escaneo sucesivo utilizando un escáner láser 3-D.
La información recopilada se utiliza posteriormente para planificar el movimiento del robot que salta en la superficie del asteroide objetivo. El robot necesitaría realizar varios saltos para llegar a la ubicación deseada en el asteroide, al mismo tiempo que evita obstáculos.
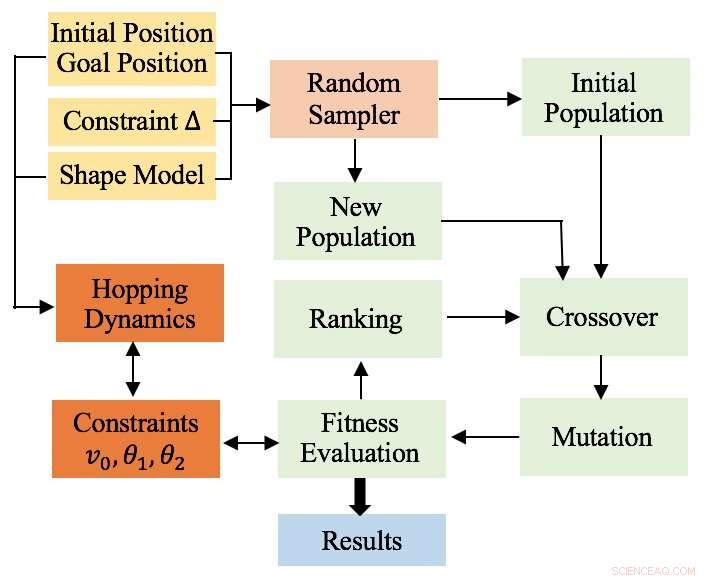
Esquema del planificador de rutas optimizado utilizando algoritmo evolutivo. Crédito:Kalita y Thangavelautham.
"La arquitectura de planificación del movimiento discutida en el documento puede encontrar trayectorias casi óptimas para que un rover salteador alcance una ubicación objetivo desde su ubicación inicial en la superficie de un asteroide con campos de gravedad irregulares. "Kalita explicó." Nuestro enfoque utiliza un modelo de dinámica de alta fidelidad para realizar una evaluación de prueba y error en la simulación de maniobras candidatas para determinar su idoneidad. La evaluación de prueba y error tiene en cuenta el riesgo, recompensas e incertidumbres locales ".
Muchos asteroides son ricos en recursos como el agua, compuestos de carbono, metales del grupo del hierro y del platino. Algunos asteroides también contienen restos de planetas existentes y, por lo tanto, podrían servir como 'cápsulas de tiempo', proporcionando registros prístinos de la geología temprana y la geohistoria de tales planetas. La exploración de estos asteroides podría ofrecer información valiosa sobre el origen del sistema solar y los planetas que contiene. En el futuro, el enfoque ideado por Thanga y Kalita podría allanar el camino para la exploración de superficies de asteroides, conduciendo a interesantes observaciones y descubrimientos.
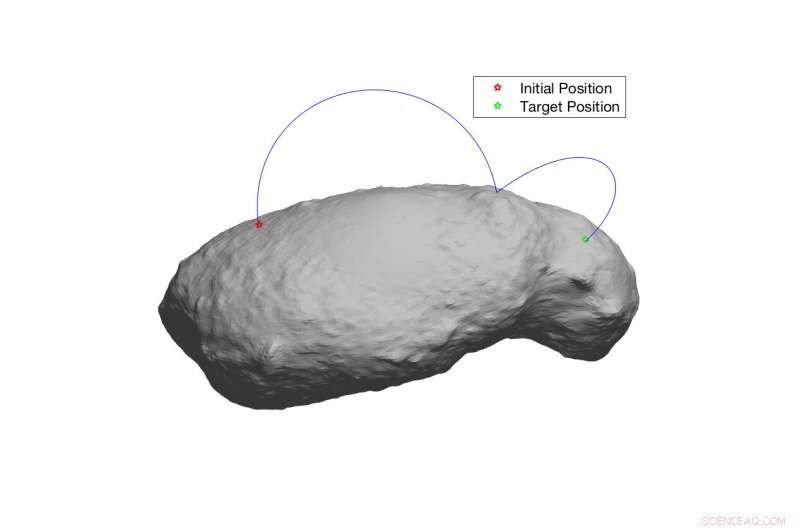
Trayectoria óptima generada por el planificador de rutas para llegar a una ubicación objetivo. Crédito:Kalita y Thangavelautham.
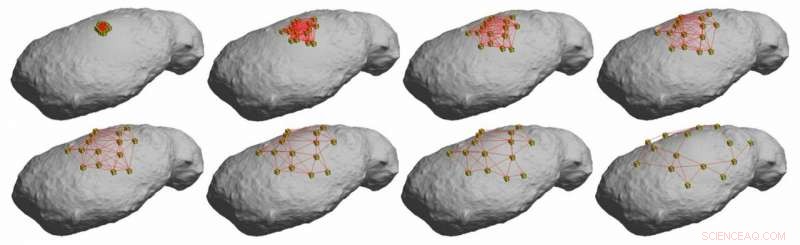
Múltiples rovers exploran la superficie del asteroide Itokawa de forma cooperativa. Crédito:Kalita y Thangavelautham.
Saltando trayectorias desde la ubicación inicial a una ubicación de destino en la superficie de Itokawa. Crédito:Kalita y Thangavelautham.
"La observación de asteroides sobrevuelos y de largo alcance es insuficiente para determinar qué hay debajo de la capa superior de asteroides, ", Dijo Thanga." Nuestro enfoque, lo que implica realizar saltos balísticos para la exploración de asteroides en la superficie, puede responder estas preguntas. Es más, los rovers desplegados en superficies de asteroides hasta la fecha dependen de una nave nodriza para la localización, pero su encuentro es infrecuente. Nuestras simulaciones muestran que al usar un sensor de mapeo 3-D a bordo, los rovers pueden realizar la autolocalización independiente de la nave nodriza, lo que es un precursor de la autonomía del rover ".
El enfoque ideado por Thanga y Kalita está diseñado para planificar eficazmente el movimiento de un robot que salta en largas distancias. en superficies de asteroides con campos de gravedad irregulares. El mismo enfoque podría aplicarse a múltiples robots coordinados que exploran simultáneamente la superficie de un asteroide determinado. Los investigadores también han ampliado su método para calcular varias trayectorias óptimas, lo que permitiría a un robot alcanzar un objetivo deseado mientras visita múltiples puntos de referencia.
"Ahora estamos en el proceso de desarrollo de prototipos de rover de salto miniaturizado que utilizará propulsores basados en sublimados para saltar, "Kalita dijo." Con campos de gravedad irregulares simulados, podremos probar nuestro enfoque para encontrar trayectorias de salto ".
© 2019 Science X Network














