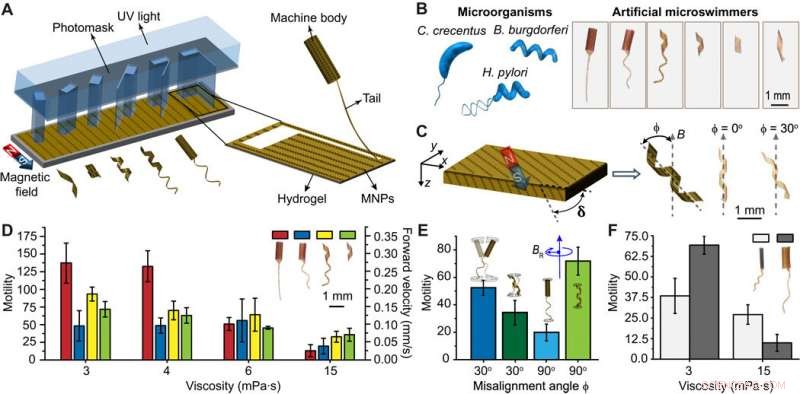
(A) Un enfoque de kirigami para construir micro nadadores suaves personalizados en masa a través de una fotolitografía de un solo paso. UV, ultravioleta. (B) Ilustración esquemática de las bacterias tomadas como inspiración para este estudio y las imágenes ópticas de los micro nadadores artificiales diseñados. (C) La alineación fuera del plano (δ ≠ 0) de los MNP conduce a un ángulo de desalineación distinto de cero (ϕ). Se muestran las imágenes ópticas que muestran a dos nadadores con formas idénticas y ϕ variables. (D) Una comparación de la motilidad de micro nadadores que nadan en fluidos con diferentes viscosidades. (E) Motilidad de los micro nadadores tubulares flagelados y micro nadadores helicoidales codificados con dos anisotropías magnéticas diferentes que giran en una solución con una viscosidad de 3 mPa · s. (F) Efecto del tamaño corporal sobre la motilidad de los micro nadadores tubulares. Los nadadores fueron impulsados a 2 Hz con una intensidad de campo de 20 mT en todos los experimentos, a menos que se diga lo contrario. Todos los gráficos de barras representan el promedio ± SEM (n =6 mediciones para cada micro nadador y tres nadadores diferentes probados por condición). Crédito:Science Advances, doi:10.1126 / sciadv.aau1532
Las bacterias muestran una plasticidad notable al explotar la mecánica en respuesta a las condiciones físicas y químicas que cambian localmente. Las estructuras compatibles generalmente ayudan a su comportamiento de taxis a navegar dentro de entornos complejos y estructurados. Los mecanismos microbiológicos bioinspirados contienen arquitecturas diseñadas racionalmente capaces de grandes, Deformación no lineal para introducir autonomía en dispositivos diseñados a pequeña escala.
En un estudio reciente, H.W. Huang y colegas de los departamentos de ingeniería mecánica, matemáticas aplicadas y física teórica, analizaron los efectos de las fuerzas hidrodinámicas y la reología del entorno local sobre la natación con un número de Reynolds bajo. En el trabajo, identificaron los desafíos y beneficios de usar el acoplamiento elastohidrodinámico en la locomoción para desarrollar un conjunto de maquinaria para construir microrobots sin ataduras con movilidad autorregulada. Los científicos pudieron demostrar el acoplamiento entre las propiedades estructurales y magnéticas de los micro nadadores artificiales con las propiedades dinámicas del fluido. durante la locomoción adaptativa en ausencia de sensores a bordo. Los resultados ahora se publican en Avances de la ciencia .
Los microorganismos contienen maquinaria diversa para el movimiento molecular para navegar de manera efectiva en entornos complejos y nichos ecológicos. En bacterias, la natación surge de las interacciones mecánicas entre los flagelos accionados, cuerpo celular y el arrastre generado por el flujo. Las fuerzas viscosas con un número de Reynolds bajo son responsables de la resistencia hidrodinámica, que a su vez depende de la forma de los objetos en movimiento.
Para optimizar su motilidad, las bacterias pueden adoptar formas y tamaños alternativos durante el curso de sus ciclos de vida. Además de cambiar la forma del cuerpo, Las bacterias también pueden utilizar sistemas de propulsión para movimientos avanzados en entornos complejos. Por ejemplo, al doblar un gancho, Caulobacter crescentus puede mejorar la motilidad, mientras que Vibrio alginolyticus puede superar a Escherichia coli multiflagelada en gradientes de nutrientes ascendentes debido a la inestabilidad del pandeo flagelar. Es más, Shewanella putrefaciens puede escapar de las trampas físicas a través de una transición polimórfica en el filamento flagelar.
Nadadores artificiales microscópicos que los investigadores desarrollaron mediante microingeniería bioinspirada para moverse a través de los fluidos corporales, atravesar barreras biológicas y acceder a sitios remotos de enfermedades podría revolucionar las terapias dirigidas. El trabajo pionero en el campo ya ha demostrado la viabilidad de imitar el flagelo procariota o eucariota para construir micro nadadores controlados magnéticamente con movimiento no recíproco. Sin embargo, a diferencia de las células vivas, estos dispositivos mecánicos no pueden detectar su entorno local ni adaptarse a los cambios en las condiciones físicas. El control de materiales artificiales puede allanar el camino para construir sintonizables, Soluciones de ingeniería duraderas y robustas, como dispositivos robóticos biohíbridos autónomos.
En el presente trabajo, Huong y col. introducir un método simple y versátil basado en la fabricación de materiales para diseñar micromáquinas blandas controladas magnéticamente. El concepto se basa en un sistema multicuerpo reconfigurable en 3-D diseñado a partir de una monocapa de hidrogel nanocompuesto. En trabajos anteriores realizados por el mismo grupo de investigación, Huang y col. detalló la forma y el perfil de magnetización de las micromáquinas autoplegadas en las que las estructuras podrían programarse de forma independiente mediante la incorporación de nanopartículas magnéticas (MNP) en capas de hidrogel con patrones.
Para este estudio, Los científicos presentaron un conjunto de estrategias de diseño para autorregular el movimiento y la maniobrabilidad a través de la interacción entre viscosos, elástico, Fuerzas magnéticas y osmóticas. Huang y col. demostró que el cuerpo reconfigurable podía transformarse continuamente de acuerdo con el fluido circundante, permitiendo el movimiento a través de constricciones para mejorar el rendimiento de la locomotora. Demostraron que el acoplamiento elastohidrodinámico en el cambio de forma y las adaptaciones de la marcha podría permitir que los microbots naveguen por el interior obstruido. Ambientes heterogéneos y dinámicos.
Papel del plan corporal en la maniobrabilidad. Los micro nadadores helicoidales mostraron el mejor rendimiento como se esperaba porque no se ocupan de la coordinación del cuerpo y la cola. Crédito:Science Advances, doi:10.1126 / sciadv.aau1532.
Huang y col. diseñó los micro nadadores suaves usando locomoción bioinspirada con una variante de origami conocida como kirigami. Las microestructuras 3-D compatibles se diseñaron a partir de un gel termorresistente reforzado con MNP (nanopartículas magnéticas). Durante el proceso de fabricación, los científicos iniciaron el corte mediante fotolitografía y el plegado tras la hidratación de la capa polimerizada. La distribución no uniforme de los MNP a lo largo de la dirección del espesor permitió la formación de dos capas distintas de hidrogeles con proporciones de hinchamiento significativamente diferentes.
Los investigadores se centraron en tres configuraciones de microorganismos, incluyendo C. crescentus, Helicobacter pylori y Borrelia burgdorferi. Las bacterias normalmente nadan girando filamentos flagelares similares a hélices que se extienden desde el cuerpo celular. La biomimetización del movimiento podría permitir que los micro nadadores artificiales se muevan, si el momento magnético de la máquina fuera perpendicular a su eje longitudinal. Sin embargo, las estructuras se parecían a las agujas de una brújula, alineando su eje largo con la dirección del campo magnético externo. Para superar esta limitación, Huang et al variaron la alineación fuera del plano de las MNP innatas en el material, manteniendo constante la alineación de las partículas en el plano.
Registro dinámico del perfil de magnetización. Los nanocompuestos reforzados magnéticamente estaban en una dirección diferente a la dirección de alineación de MNP. El campo aplicado fue significativamente más alto que el campo magnético aplicado para alinear partículas durante la fabricación de los microbots. Crédito:Science Advances, doi:10.1126 / sciadv.aau1532.
Para optimizar el movimiento a diferentes viscosidades, las microestructuras adquirieron diferentes andares. Para explorar sistemáticamente la ventaja potencial de la diversidad morfológica, Huong et al. construyó micro nadadores con diferentes planes corporales y los accionó en fluidos con viscosidad variable. Los científicos pudieron diseñar micro nadadores que siguieron trayectorias helicoidales tridimensionales coordinando su morfología con su perfil de magnetización. En todos los experimentos, el número de Reynolds osciló entre 10 -2 a 10 -4 ; para indicar natación bajo flujo laminar.
En una solución de sacarosa con la misma viscosidad que la sangre, los micro nadadores flagelados con una cola plana flexible y un cuerpo tubular se movían más rápido por movimiento helicoidal en comparación con otros prototipos. Los micro nadadores flagelados se beneficiaron del movimiento helicoidal y de sacacorchos, mientras que los micro nadadores helicoidales realizaban movimientos de sacacorchos. Sin embargo, durante el aumento de la viscosidad, el movimiento de todos los micro nadadores disminuyó, pero la caída fue mayor para los micro nadadores flagelados con cola plana. A mayor viscosidad, Huong et al observaron que los micro nadadores helicoidales eran los más rápidos, ya que el único movimiento relevante en las condiciones era el movimiento de sacacorchos.
Junto al movimiento, la capacidad de regular el movimiento (maniobrabilidad) juega un papel clave en las bacterias para detectar y detectar gradientes de nutrientes. Los científicos probaron la maniobrabilidad de los micro nadadores artificiales induciendo desviaciones en el ángulo de guiñada (rotación) durante la natación. Un micro nadador altamente maniobrable podría cambiar su dirección de movimiento rápidamente con un pequeño cambio en la señal de control. Durante perturbaciones más fuertes (rotación de guiñada de 45 grados), tanto la geometría del cuerpo como la cola jugaron un papel importante en la respuesta de los micro nadadores compatibles. Estructuralmente el cuerpo respondió a la señal de control antes que la cola, ya que la magnetización del cuerpo era mayor. Los nadadores con cola plana mostraron una mayor susceptibilidad a las inestabilidades, una cola helicoidal podría contribuir comparativamente a la estabilización debido a una mayor rigidez de la geometría helicoidal.
Adaptación de forma en canales curvos bajo flujo axial con un caudal de 2 ml / min. La deformación observada fue elástica, y los nadadores recuperaron completamente su forma después de pasar por la esquina bajo el flujo aplicado externamente con una velocidad de 2 ml / min. El aumento de la rigidez de los filamentos redujo la deformación y provocó la obstrucción del canal. Crédito:Science Advances, doi:10.1126 / sciadv.aau1532. 
Huong y sus compañeros de trabajo determinaron la eficiencia de propulsión de los nadadores compatibles mediante el acoplamiento entre las fuerzas magnéticas, Flexibilidad del filamento y arrastre viscoso. Investigaron las propiedades elastohidrodinámicas para desencadenar una transición de la marcha en respuesta al cambio de viscosidad. Los científicos observaron el enrollamiento de la cola del microbot a mayor viscosidad y frecuencia. La transición o transformación morfológica observada, contribuyó al movimiento del sacacorchos para mejorar la motilidad del microbot.

Adaptación de la marcha de micro nadadores tubulares con cola elástica. Las propiedades elastohidrodinámicas se pueden aprovechar para desencadenar una transición de la marcha en respuesta a cambios en la viscosidad alta y baja. Crédito:Science Advances, doi:10.1126 / sciadv.aau1532.
Basado en estrategias integrales de movimiento y maniobrabilidad, Los datos obtenidos en el estudio revelaron que un cuerpo tubular con cola plana era preferible a nadar a baja viscosidad. Relativamente, una morfología helicoidal podría funcionar mejor a mayor viscosidad. Huong y col. construyó un micro nadador reconfigurable magnéticamente para someterse a una transformación de forma entre las dos configuraciones en función de las condiciones externas. Los micro nadadores programados podrían cambiar de forma para lograr una velocidad de avance sostenida y una mayor maniobrabilidad a pesar del aumento de las fuerzas viscosas.
De este modo, Los análisis cuidadosos del rendimiento de la natación a diferentes viscosidades proporcionaron una guía para construir una sola micromáquina. Para resolver el problema de la navegación a micro / nanoescala, Huong y col. redujo el número de elementos a controlar para las ventajas resultantes de la velocidad, versatilidad y costo. Los microbots se pueden fabricar a través de métodos escalables y de alto rendimiento para abrir las puertas al desarrollo de una gama de microbots suaves para aplicaciones médicas e industriales.
© 2019 Science X Network