Agarres de precisión (izquierda) y poder (derecha) generados por el planificador de agarres. Crédito:Lu &Hermans.
Investigadores de la Universidad de Utah han desarrollado recientemente un planificador de agarre probabilístico que puede modelar explícitamente tipos de agarre para planificar agarres de fuerza y precisión de alta calidad en tiempo real. Su enfoque de aprendizaje supervisado, descrito en un artículo publicado previamente en arXiv, Puede planificar de forma eficaz tanto agarres de fuerza como de precisión para un objeto determinado.
Tanto para humanos como para robots, diferentes tareas de manipulación requieren diferentes tipos de agarres. Por ejemplo, sosteniendo una herramienta pesada, como un martillo, Requiere un agarre de poder con múltiples dedos que ofrezca estabilidad, mientras que sostener un bolígrafo requiere un agarre de precisión con varios dedos, ya que esto puede impartir destreza en el objeto.
Al probar su enfoque anterior para comprender la planificación, el equipo de investigadores de la Universidad de Utah notó que casi siempre generaba agarres de poder en los que la mano del robot envuelve un objeto, con grandes regiones de contacto entre su mano y el objeto. Estos agarres son útiles para completar una variedad de tareas robóticas, como recoger objetos en otro lugar de la habitación, sin embargo, son inútiles cuando se realizan tareas de manipulación en la mano.
"Piense en mover un pincel o un bisturí que está sosteniendo con la punta de los dedos, "Tucker Hermans, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Este tipo de tareas requieren agarres precisos, donde el robot sostiene el objeto con la punta de los dedos. Mirando la literatura, vimos que los métodos existentes tienden a generar solo un tipo de comprensión, ya sea precisión o potencia. Así que nos propusimos crear un enfoque de síntesis de prensión que pueda manejar ambos. De esta manera, nuestro robot puede usar agarres eléctricos para recoger y colocar de manera estable los objetos que quiere mover, pero la precisión agarra cuando necesita realizar tareas de manipulación en la mano ".
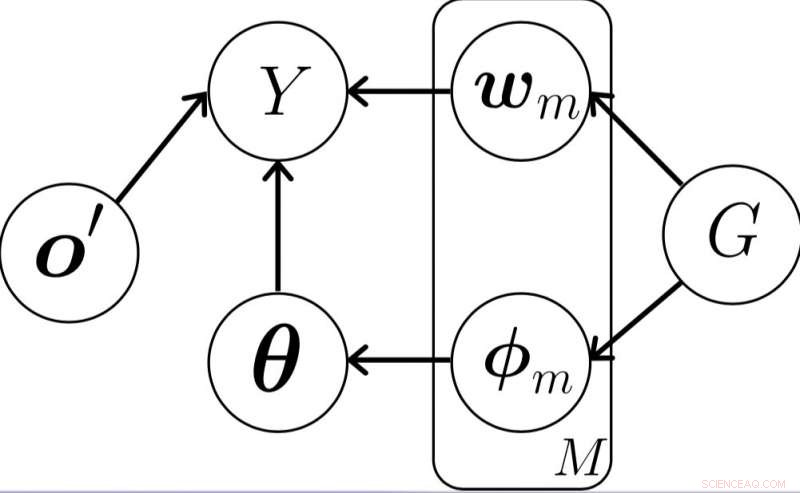
El modelo gráfico probabilístico de tipo agarre propuesto. Crédito:Lu &Hermans.
En el enfoque para comprender la planificación ideado por Hermans y su colega Qingkai Lu, un robot aprende a predecir el éxito en el agarre a partir de experiencias pasadas. El robot intenta diferentes tipos de agarres en diferentes objetos, registrar cuáles de estos tuvieron éxito y cuáles fallaron. Luego, estos datos se utilizan para entrenar a un clasificador a predecir si una comprensión determinada tendrá éxito o no.
"El clasificador toma como entrada una imagen de profundidad del objeto y la configuración de agarre seleccionada (es decir, dónde poner la mano y cómo dar forma a los dedos), ", Explicó Hermans." Además de predecir el éxito, el clasificador informa qué tan seguro está de que el agarre tendrá éxito en una escala de cero a uno. Cuando se le presenta un objeto para agarrar, el robot planea un agarre buscando entre diferentes agarres posibles y seleccionando el agarre que el clasificador predice con mayor confianza para lograrlo ".
El enfoque de aprendizaje supervisado desarrollado por Hermans y Lu puede planificar diferentes tipos de agarres para objetos nunca antes vistos, incluso cuando solo se dispone de información visual parcial. El suyo podría ser el primer método de planificación de prensión para planificar explícitamente tanto prensas de fuerza como de precisión.
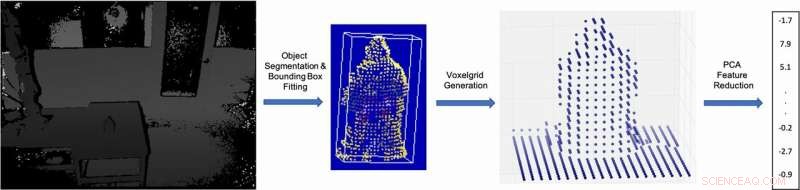
Ilustración del proceso de extracción de características visuales. Crédito:Lu &Hermans.

Ejemplo de imagen RGB generada por la cámara Kinect2 que muestra el robot y el objeto tipo Lego sobre la mesa. Crédito:Lu &Hermans.
Los investigadores evaluaron su modelo y lo compararon con un modelo que no codifica el tipo de agarre. Sus hallazgos sugieren que modelar el tipo de prensión puede mejorar la tasa de éxito de las prensiones generadas, con su modelo superando al otro método.
"Creemos que nuestros resultados son importantes de dos formas significativas, "Hermans dijo." Primero, Nuestro enfoque propuesto permite a un robot seleccionar explícitamente el tipo de agarre que desea, resolviendo el problema que nos propusimos abordar. Segundo, y potencialmente más importante, La incorporación de este conocimiento de tipo agarre en el sistema mejora realmente la capacidad del robot para agarrar objetos con éxito. Por lo tanto, incluso si solo quieres un tipo de agarre, decir poder agarra, todavía ayuda saber que existen agarres de precisión cuando se aprende a agarrar ".
El enfoque ideado por Hermans y Lu podría ayudar al desarrollo de robots que puedan generar un conjunto diverso de conocimientos. En última instancia, esto permitiría a estos robots completar una variedad más amplia de tareas, que conllevan diferentes tipos de manipulación de objetos.

Ejemplos de agarres de precisión y poder exitosos generados por el nuevo enfoque de modelado de tipo agarre para la planificación de agarres. Las dos filas superiores son agarres de precisión. Las dos filas inferiores son agarres de fuerza. Crédito:Lu &Hermans.

Agarres de precisión (izquierda) y poder (derecha) generados por el nuevo planificador de agarres. Crédito:Lu &Hermans.
"Ahora estamos viendo dos extensiones directas de este trabajo, "Hermans dijo." Primero, deseamos examinar los efectos de modelar más tipos de prensas, por ejemplo, distinguir entre subtipos de agarres de precisión caracterizados por diferentes segmentos del dedo que hacen contacto con el objeto. Para lograr esto, Estamos planeando aumentar la mano del robot con piel para permitir la detección automática de dónde se hacen los contactos. Segundo, deseamos incorporar más información para ayudar a seleccionar automáticamente el tipo de agarre apropiado dada una tarea solicitada. Por ejemplo, ¿Cómo puede el robot decidir automáticamente que debe usar un agarre de precisión para crear una pintura? sin que el operador lo diga? "
© 2019 Science X Network