Crédito:Tsuchiya et al.
Un equipo de investigadores de la Universidad de Yamagata y la Universidad de Ciencias de Teikyo, en Japón, han desarrollado recientemente un nuevo biólogo itinerante, o ballena rover, que puede viajar a lo largo de la superficie corporal de un cachalote y recopilar valiosos datos de comportamiento. La biologización implica el seguimiento biológico de animales individuales, típicamente conectando pequeños registradores de datos directamente a sus cuerpos. Puede ser una forma muy eficaz de desvelar los misterios de la vida animal, mediante la recopilación de datos y observaciones relacionadas con el comportamiento de un animal, movimiento, y biología.
"Nuestro proyecto comenzó en 2012. En el año anterior, un zoólogo marino, Prof. Kyoichi Mori, me había consultado sobre cómo podíamos abordar un problema actual, "Prof. Yuichi Tsumaki, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Estábamos ansiosos por capturar datos de video de cachalotes cazadores, porque nadie sabe qué pasa cuando un cachalote se come un calamar gigante ".
Tradicionalmente, los animales son estudiados observando visualmente su comportamiento, hábitos y biología. Sin embargo, Estos métodos de observación visual son difíciles de implementar cuando se trata de investigar la ecología de los animales marinos. particularmente aquellos que habitan en las profundidades del mar o del océano.
Las técnicas de biologización han mejorado significativamente la capacidad de los investigadores para estudiar estos animales en su hábitat natural. En años recientes, Los avances en la tecnología electrónica han llevado al desarrollo de una amplia gama de biologgers de diferentes tamaños y pesos.
Los biologgers permiten a los investigadores recopilar información clave sobre los animales marinos, incluyendo su trayectoria de movimiento 3-D, profundidad de buceo, y velocidad de natación, así como datos fisiológicos como la temperatura corporal y las lecturas del electrocardiograma. Algunos de estos biólogos también están equipados con cámaras y, por lo tanto, pueden recopilar imágenes o videos sin precedentes que representan el comportamiento social o depredador de un animal.
Crédito:Tsuchiya et al.
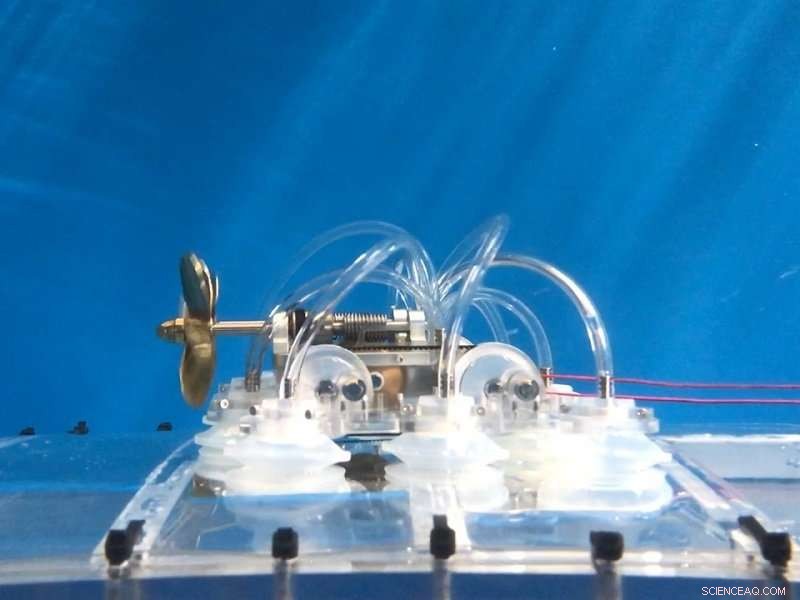
"Queríamos colocar un registrador de cámara alrededor del área de la boca, con el objetivo principal de filmar imágenes de un cachalote comiendo un calamar gigante, "Explicó Tsumaki." Para lograr esto, Desarrollamos un vehículo ballenero que tiene potencial para alcanzar el área de la boca del animal. El Whale Rover se basa en el 'concepto impulsado por el medio ambiente' propuesto en nuestro trabajo anterior, en el contexto de la exploración de asteroides. Para moverse en entornos hostiles con mecanismos mínimos, la energía del medio ambiente se utiliza para la locomoción. Idealmente, este sistema debería lograr tanto compacidad como movilidad a una profundidad de más de 1000 m ".
El vehículo ballenero desarrollado por Tsumaki y sus colegas mejora la visibilidad del área de la boca de un cachalote mientras se mueve a través de las profundidades del mar. viajando a lo largo de la superficie del cuerpo del animal utilizando tecnología robótica. Un concepto impulsado por el medio ambiente ideado por los investigadores permite al biologista lograr el movimiento de adsorción, utilizando la corriente de agua generada por una ballena nadando como fuente de energía, sin depender de una unidad central de procesamiento (CPU) y una batería distintas.
"Redujimos el tamaño concentrando el sistema de válvulas, y aumentó la fuerza de adsorción al aumentar el tamaño y la flexibilidad de la ventosa, "Kosuke Tsuchiya, otro investigador involucrado en el estudio, dijo a TechXplore. "Hemos logrado el movimiento de caminar por adsorción a una profundidad de 500 m utilizando solo el flujo de agua como fuente de energía. Nuestra tecnología tiene el potencial de ser utilizada no solo en el área de biologización sino también en aplicaciones de robots submarinos, como la inspección de sistemas de cables submarinos o la inspección del fondo de grandes embarcaciones ".
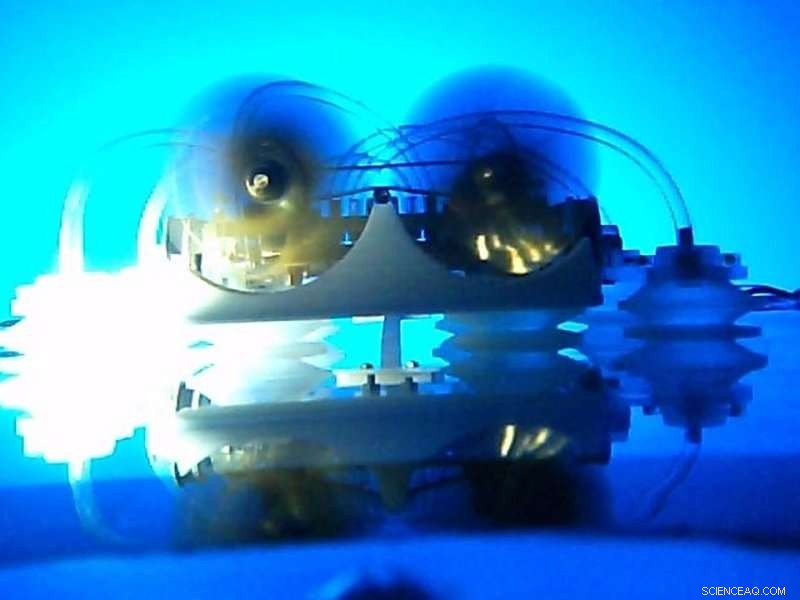
Los investigadores probaron su innovador robot ballenero impulsado por el medio ambiente en varios experimentos de campo y de laboratorio. Descubrieron que podía viajar con éxito a través de una superficie acrílica plana a una profundidad de casi 500 m, lo que confirma su aplicabilidad en ambientes de aguas profundas.
Crédito:Tsuchiya et al.
En experimentos de laboratorio de tanques de agua, el biologista podría viajar a través de una superficie acrílica curva de 1,5 m de radio, con una tasa de éxito del 46%. Estos hallazgos preliminares sugieren que la tecnología podría no ser aplicable aún en escenarios del mundo real, donde tendría que viajar distancias más largas. Sin embargo, en general, el biólogo arrojó resultados muy prometedores, mostrando un gran potencial para una variedad de aplicaciones submarinas.
"En la actualidad, estamos diseñando un nuevo prototipo con una nueva disposición de ventosa, equipo de medición y flotador, "Tsumaki dijo." Estas características deberían permitirnos unir el prototipo a la superficie del cuerpo de un cachalote por primera vez. En el futuro cercano, realizaremos experimentos en el océano alrededor de las islas Ogasawara ".
© 2018 Science X Network