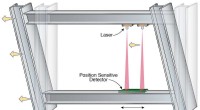
HAMR-E usa almohadillas electroadhesivas en sus pies y un patrón de marcha especial para trepar en vertical, invertido y en superficies curvas, como el interior de este motor a reacción. Crédito:Instituto Wyss de la Universidad de Harvard
Los motores a reacción pueden tener hasta 25, 000 piezas individuales, haciendo que el mantenimiento regular sea una tarea tediosa que puede llevar más de un mes por motor. Muchos componentes están ubicados en el interior del motor y no se pueden inspeccionar sin desarmar la máquina. agregando tiempo y costos al mantenimiento. Este problema no se limita solo a los motores a reacción, cualquiera; muchos complicados, máquinas caras como equipos de construcción, generadores, y los instrumentos científicos requieren grandes inversiones de tiempo y dinero para inspeccionarlos y mantenerlos.
Investigadores del Instituto Wyss de Ingeniería Biológicamente Inspirada de la Universidad de Harvard y la Escuela de Ingeniería y Ciencias Aplicadas John A. Paulson (SEAS) han creado un micro-robot cuyas almohadillas electroadhesivas para los pies, articulaciones de tobillo de origami, y la marcha para caminar especialmente diseñada le permiten trepar en superficies conductoras verticales y al revés, como las paredes interiores de un motor a reacción comercial. El trabajo se informa en Ciencia Robótica .
"Ahora que estos robots pueden explorar en tres dimensiones en lugar de moverse de un lado a otro sobre una superficie plana, hay un mundo completamente nuevo en el que pueden moverse e interactuar, "dijo el primer autor Sébastien de Rivaz, ex investigador del Wyss Institute y SEAS que ahora trabaja en Apple. "Algún día podrían permitir la inspección no invasiva de áreas de difícil acceso de máquinas grandes, ahorrando tiempo y dinero a las empresas y haciendo que esas máquinas sean más seguras ".
El nuevo robot llamado HAMR-E (Harvard Ambulatory Micro-Robot with Electroadhession), fue desarrollado en respuesta a un desafío enviado al Harvard Microrobotics Lab por Rolls-Royce, que preguntó si sería posible diseñar y construir un ejército de micro-robots capaces de trepar dentro de las partes de sus motores a reacción que son inaccesibles para los trabajadores humanos. Los robots trepadores existentes pueden abordar superficies verticales, pero experimenta problemas al intentar escalar al revés, ya que requieren una gran cantidad de fuerza adhesiva para evitar que se caigan.
El equipo basó HAMR-E en uno de sus micro-robots existentes, HAMR, cuyas cuatro patas le permiten caminar sobre superficies planas y nadar en el agua. Si bien el diseño básico de HAMR-E es similar a HAMR, los científicos tuvieron que resolver una serie de desafíos para lograr que HAMR-E se adhiriera y atravesara con éxito la vertical, invertido y superficies curvas que encontraría en un motor a reacción.
Primero, necesitaban crear almohadillas adhesivas para los pies que mantuvieran el robot adherido a la superficie incluso al revés, pero también suelte para permitir que el robot "camine" levantando y colocando sus pies. Las almohadillas constan de un electrodo de cobre aislado con poliimida, lo que permite la generación de fuerzas electrostáticas entre las almohadillas y la superficie conductora subyacente. Las almohadillas para los pies se pueden soltar y volver a acoplar fácilmente encendiendo y apagando el campo eléctrico, que opera a un voltaje similar al requerido para mover las piernas del robot, por lo que requiere muy poca energía adicional. Las almohadillas electroadhesivas para los pies pueden generar fuerzas de corte de 5,56 gramos y fuerzas normales de 6,20 gramos, más que suficiente para evitar que el robot de 1,48 gramos se deslice hacia abajo o se caiga de su superficie de escalada. Además de proporcionar altas fuerzas adhesivas, las almohadillas fueron diseñadas para poder flexionarse, permitiendo así que el robot trepe sobre superficies curvas o irregulares.
Los científicos también crearon nuevas articulaciones de tobillo para HAMR-E que pueden rotar en tres dimensiones para compensar las rotaciones de sus piernas mientras camina. permitiéndole mantener su orientación en su superficie de escalada. Las juntas se fabricaron con capas de fibra de vidrio y poliimida, y doblado en una estructura similar a un origami que permite que los tobillos de todas las piernas giren libremente, y alinearse pasivamente con el terreno a medida que HAMR-E asciende.
Finalmente, los investigadores crearon un patrón de marcha especial para HAMR-E, ya que debe tener almohadillas de tres pies que toquen una superficie vertical o invertida en todo momento para evitar que se caiga o se deslice. Un pie se suelta de la superficie, se balancea hacia adelante, y se vuelve a colocar mientras los tres pies restantes permanecen unidos a la superficie. Al mismo tiempo, El pie aplica una pequeña cantidad de torque en diagonal a través del pie levantado para evitar que el robot se aleje de la superficie de escalada durante la fase de balanceo de piernas. Este proceso se repite para las otras tres piernas para crear un ciclo completo de caminata. y está sincronizado con el patrón de conmutación del campo eléctrico en cada pie.
Cuando se probó HAMR-E en superficies verticales e invertidas, fue capaz de lograr más de cien pasos seguidos sin separarse. Caminaba a velocidades comparables a otros pequeños robots trepadores en superficies invertidas y ligeramente más lento que otros robots trepadores en superficies verticales. pero fue significativamente más rápido que otros robots en superficies horizontales, lo que lo convierte en un buen candidato para explorar entornos que tienen una variedad de superficies en diferentes disposiciones en el espacio. También es capaz de realizar giros de 180 grados en superficies horizontales.
HAMR-E también maniobró con éxito alrededor de una curva, sección invertida de un motor a reacción mientras permanece conectado, y sus articulaciones pasivas de tobillo y almohadillas adhesivas para los pies pudieron adaptarse a las características ásperas y desiguales de la superficie del motor simplemente aumentando el voltaje de electroadhesión.
El equipo continúa perfeccionando HAMR-E, y planea incorporar sensores en sus patas que puedan detectar y compensar las almohadillas de los pies desprendidas, lo que ayudará a evitar que se caiga de superficies verticales o invertidas. La capacidad de carga útil de HAMR-E también es mayor que su propio peso, abriendo la posibilidad de llevar una fuente de alimentación y otros componentes electrónicos y sensores para inspeccionar varios entornos. El equipo también está explorando opciones para usar HAMR-E en superficies no conductoras.
"Esta iteración de HAMR-E es el primer y más convincente paso para demostrar que esta aproximación a un robot trepador de escala centimétrica es posible, y que dichos robots podrían utilizarse en el futuro para explorar cualquier tipo de infraestructura, incluyendo edificios, tubería, motores, generadores, y más, "dijo el autor correspondiente Robert Wood, Doctor., quien es miembro fundador de la facultad principal del Wyss Institute, así como profesor de ingeniería y ciencias aplicadas Charles River en SEAS.
"Si bien los científicos académicos son muy buenos para plantear preguntas fundamentales para explorar en el laboratorio, a veces se requiere la colaboración de científicos industriales que comprenden los problemas del mundo real para desarrollar tecnologías innovadoras que puedan traducirse en productos útiles. Estamos emocionados de ayudar a catalizar estas colaboraciones aquí en el Instituto Wyss, y ver los grandes avances que surgen, "dijo el director fundador de Wyss, Donald Ingber, MARYLAND., Doctor., quien también es el Profesor Judah Folkman de Biología Vascular en la Escuela de Medicina de Harvard y el Programa de Biología Vascular en el Boston Children's Hospital, y Catedrático de Bioingeniería en SEAS.