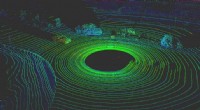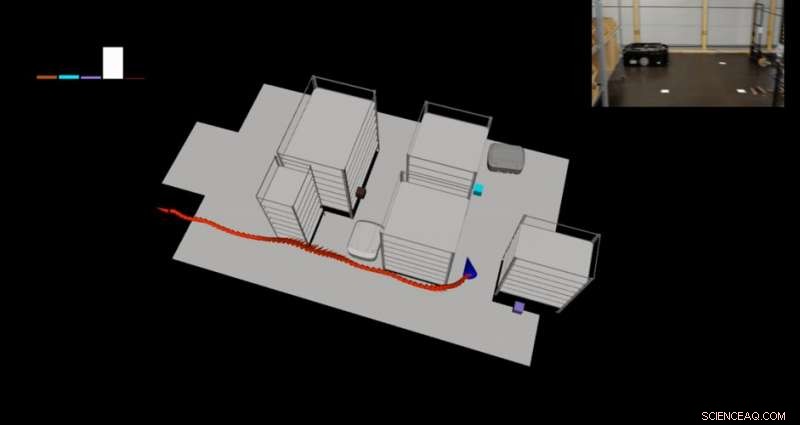
La trayectoria del trabajador humano en el área de prueba del Almacén. Los datos de ubicación son proporcionados por el algoritmo de localización de Hololens. En la parte superior derecha se puede ver la vista en primera persona del trabajador. En la parte superior izquierda están las probabilidades de que el trabajador alcance un objetivo específico. Crédito:Petkovic et al.
El rápido crecimiento de las empresas de logística ha generado la necesidad de sistemas de almacenamiento más evolucionados y eficientes. Los avances en robótica podrían ayudar a satisfacer estas necesidades al automatizar las tareas que actualmente realizan los humanos, acelerando significativamente el flujo de trabajo.
Para operar de manera segura y eficiente, sin embargo, Los asistentes de almacén de robots deberían poder reconocer las intenciones de sus operadores humanos. Investigadores de la Universidad de Zagreb y el Instituto de Tecnología de Karlsruhe han desarrollado recientemente un algoritmo de estimación de la intención humana basado en los principios de la teoría de la mente (ToM). ToM es la capacidad humana para reconocer la intención, creencias, deseos, emociones, y estados mentales en otros humanos.
"Nuestra investigación nació del proyecto SafeLog de Horizonte 2020 de la UE, que tiene como objetivo permitir la entrada segura de personas en almacenes completamente automatizados, donde los robots móviles transportan bastidores, sin cerrar toda la flota de robots, "David Puljiz, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Esto se hace mediante el uso de un chaleco de seguridad especialmente diseñado y un dispositivo AR para guiar y ayudar al trabajador a navegar en este entorno".
Para mejorar la seguridad, el sistema de seguridad del almacén ideado por los investigadores planifica la trayectoria de un robot para que no choque con la de los trabajadores humanos. Para que funcione necesita saber adónde va el operador humano, particularmente si no se dirige a un lugar previamente acordado.
Puljiz y sus colegas observaron el movimiento de trabajadores humanos individuales en entornos de almacén y los validaron con respecto a las ubicaciones de sus objetivos. utilizando un enfoque llamado planificación basada en el diagrama de Voronoi generalizado. Estas observaciones fueron luego alimentadas a un modelo de Markov oculto, que puede estimar las intenciones de un trabajador en línea mientras navega por entornos cambiantes.
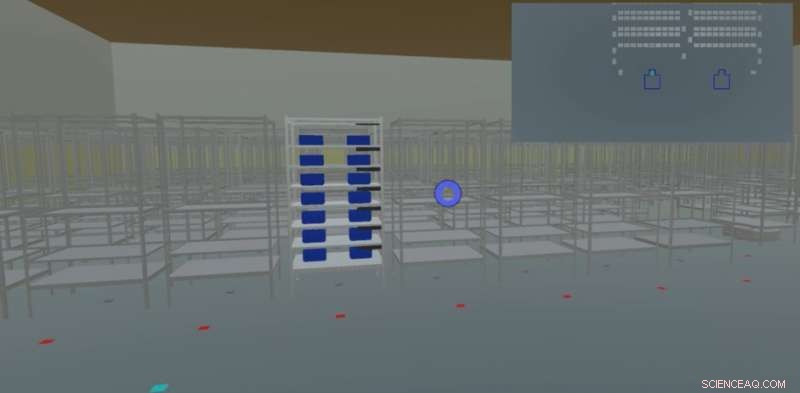
La vista en primera persona en el entorno de realidad virtual, utilizado para probar el algoritmo en escenarios a gran escala. En la parte superior izquierda se puede ver una vista de pájaro del área alrededor del trabajador, incluidos los robots móviles. Crédito:Puljiz et al.
"El algoritmo de estimación de intención humana basado en ToM propuesto para almacenes robotizados flexibles se basa en la validación de movimiento del modelo de Markov oculto, "Tomislav Petkovic, otro investigador involucrado en el estudio, dijo a TechXplore. "Observamos el movimiento del trabajador y lo validamos con respecto a las ubicaciones de los objetivos utilizando una planificación de ruta generalizada basada en el diagrama de Voronoi. Estas observaciones son luego procesadas por el marco del modelo de Markov oculto, que estima las intenciones de los trabajadores en línea y es capaz de manejar entornos cambiantes. El laboratorio LAMOR de la Universidad de Zagreb ha desarrollado el backend del algoritmo:validación de movimiento y estimación de objetivos ".
Para evaluar la efectividad del modelo, IPR Lab en el Instituto de Tecnología de Karlsruhe llevó a cabo experimentos de estimación de intención en un entorno de prueba de almacén pequeño, utilizando gafas AR de Microsoft Hololens. Los investigadores llevaron a cabo evaluaciones adicionales en almacenes virtuales a gran escala, utilizando tecnología VR. Descubrieron que su marco podía estimar eficazmente las intenciones de los trabajadores del almacén, con notable precisión.
"Creo que el aspecto más significativo de nuestro estudio es que los dispositivos de RA se pueden usar para más que entretenimiento o marketing y, de hecho, pueden ser útiles en entornos industriales. Puljiz dijo. "El campo de investigación es bastante nuevo y hay muchas posibilidades en esta área".
En el futuro, el algoritmo de estimación de la intención humana en tiempo real desarrollado por Puljiz y sus colegas podría aumentar la seguridad y la eficiencia de los sistemas robóticos basados en almacenes. Por ejemplo, podría ayudar al desarrollo de robots más receptivos que puedan estimar las intenciones de los operadores humanos a su alrededor, adaptando y planificando sus rutas en consecuencia.
"En el trabajo futuro, Podríamos extender el algoritmo a espacios 3D y seguir la dirección de la mirada en 3D para determinar, por ejemplo, si el trabajador tiene la intención de elegir el objeto equivocado o si le preocupa que se acerque un robot, ", Dijo Puljiz." Hay muchas otras posibilidades, incluidas las integraciones de seguimiento manual ".
© 2018 Science X Network