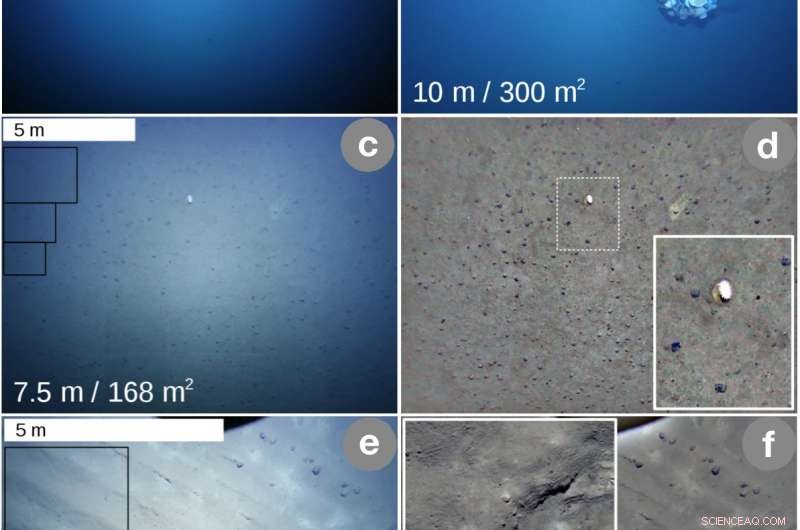
Imágenes de AUV ABYSS del lecho marino del Pacífico 10, 7.5, y 4 metros de distancia. Las dos imágenes superiores muestran un módulo de aterrizaje estacionario, también un dispositivo submarino autónomo Las imágenes c a f muestran nódulos de manganeso reconocibles como puntos oscuros en el lecho marino. Crédito:AUV-Team / GEOMAR
La evaluación de grandes cantidades de datos es cada vez más relevante en la investigación oceánica. Los robots de buceo o los vehículos submarinos autónomos que realizan mediciones de forma independiente en las profundidades del mar ahora pueden registrar grandes cantidades de imágenes de alta resolución. Para evaluar científicamente estas imágenes de manera sostenible, se deben cumplir una serie de requisitos previos en la adquisición de datos, curación y gestión de datos.
"Durante los últimos tres años, Hemos desarrollado un flujo de trabajo estandarizado que permite evaluar científicamente grandes cantidades de datos de imágenes de forma sistemática y sostenible. "explica el Dr. Timm Schoening del grupo de trabajo de Monitoreo de aguas profundas encabezado por el Prof. Dr. Jens Greinert en GEOMAR. El vehículo submarino autónomo ABYSS fue equipado con un nuevo sistema de cámara digital para estudiar el ecosistema alrededor de los nódulos de manganeso en el Océano Pacífico. los datos recopilados de esta manera, el flujo de trabajo fue diseñado y probado por primera vez. Los resultados ya se han publicado en la revista internacional Datos científicos .
El procedimiento se divide en tres pasos:adquisición de datos, conservación de datos y gestión de datos, en cada uno de los cuales se deben completar los pasos intermedios definidos. Por ejemplo, es importante especificar cómo se configurará la cámara, qué datos se van a capturar, o qué iluminación es útil para responder a una pregunta científica específica. En particular, También se deben registrar los metadatos del robot de buceo. "Para el procesamiento de datos, es fundamental vincular los datos de imagen de la cámara con los metadatos del robot de buceo, "dice Schoening. El AUV ABYSS, por ejemplo, registró automáticamente su posición, la profundidad de la inmersión y las propiedades del agua circundante. "Toda esta información tiene que estar vinculada a la imagen respectiva porque brinda información importante para una evaluación posterior, ", dice Schoening. Una tarea enorme:ABYSS reunió más de 500, 000 imágenes del fondo marino en alrededor de 30 inmersiones. Varios programas, que el equipo desarrolló especialmente para este propósito, se aseguró de que los datos se reunieran. Aquí, material de imagen inutilizable, como los que tienen desenfoque de movimiento, fue removido.
Todos estos procesos ahora están automatizados. "Hasta entonces, sin embargo, había sido necesario un gran número de pasos que requerían mucho tiempo, "dice Schoening." Ahora el método se puede transferir a cualquier proyecto, incluso con otros AUV o sistemas de cámaras ”. El material procesado de esta manera se puso a disposición del público en forma permanente.
Finalmente, La inteligencia artificial en forma del algoritmo especialmente desarrollado "CoMoNoD" se utilizó para la evaluación en GEOMAR. Registra automáticamente si hay nódulos de manganeso presentes en una foto, en qué tamaño y en qué posición. Después, por ejemplo, las imágenes individuales podrían combinarse para formar mapas más grandes del fondo marino. El próximo uso del flujo de trabajo y los programas recientemente desarrollados ya está planeado:en la próxima expedición en la primavera del próximo año en la dirección de los nódulos de manganeso, la evaluación del material de imagen se llevará a cabo directamente a bordo. "Por lo tanto, llevaremos a bordo algunas computadoras particularmente poderosas, "dice Timm Schoening.
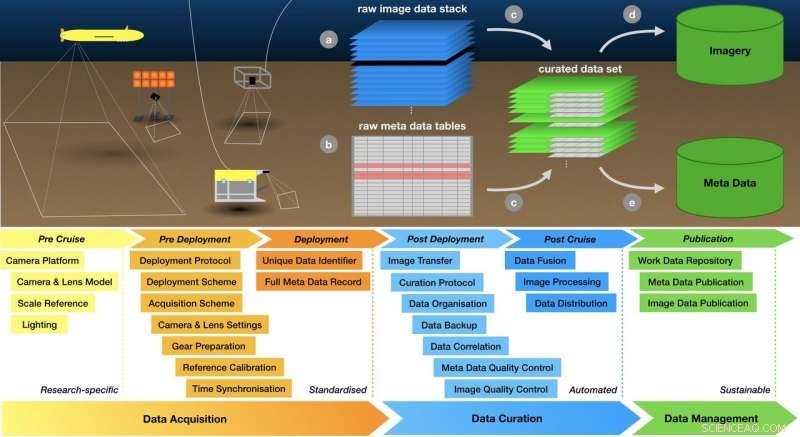
Descripción general esquemática del flujo de trabajo para el análisis de datos de imágenes desde la adquisición de datos hasta la curación y la gestión de datos. Crédito:Timm Schoening / GEOMAR