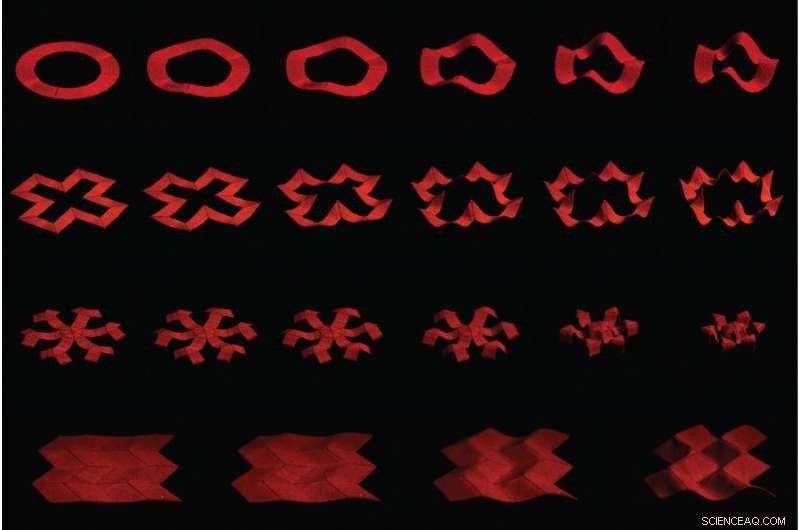
Foto de lapso de tiempo para varios diseños de material activo magnético desarrollado. Crédito:Laboratorio de materiales activos blandos del MIT
Las nuevas estructuras robóticas impresas en 3-D pueden apretarse en espacios reducidos como una grieta en la pared de una cueva, saltar por encima del cable de disparo o gatear debajo de un vehículo, todas funciones complejas relevantes para el Ejército imposibles de realizar para los humanos de manera segura.
Investigadores del Instituto de Nanotecnologías de Soldados (ISN) del Ejército, ubicado en el MIT, han desarrollado una plataforma de impresión 3-D que puede permitir tanto el modelado como el diseño de dispositivos complejos activados magnéticamente. El nuevo enfoque utiliza una plataforma de impresión 3-D equipada con una boquilla de electroimán y un nuevo tipo de tinta imprimible en 3D impregnada de partículas magnéticas. Sus hallazgos podrían conducir a nuevas aplicaciones biomédicas, tinta magnética optimizada para fortalecer la funcionalidad robótica suave, y nuevos sistemas de materiales flexibles bajo demanda para su integración en los sistemas Soldier.
Las capacidades robóticas suaves y la fabricación en el punto de necesidad se encuentran entre las principales prioridades de investigación del Ejército.
Esta investigación es administrada a través de la Oficina de Investigación del Ejército del Laboratorio de Investigación del Ejército de los EE. UU. Por el Dr. Aura Gimm.
"Esta investigación proporcionó una nueva perspectiva sobre las formas de provocar cambios rápidos en las formas tridimensionales de partes como las extremidades de los robots. El grupo del MIT demostró este éxito utilizando metamateriales auxéticos, materiales compuestos sintéticos que tienen una estructura interna inusual y la propiedad inusual de que cuando se exponen a la actuación magnética externa, se encogieron tanto en dirección longitudinal como transversal. Esto es diferente de los materiales auxéticos típicos que requieren contacto mecánico directo, y cuando se comprimen sufren contracción en las direcciones perpendiculares a la fuerza aplicada (esto se llama la relación de Poisson negativa). De lo contrario, los materiales comunes se expanden en las direcciones ortogonales a la carga de compresión. En un ejemplo de esta investigación, a través de control magnético remoto, hicieron que una estructura de metamaterial saltara hacia adelante 120 mm en 0,7 s, que es muy rápido para el estado actual de la técnica. Este salto se debió a una rápida liberación de energía potencial elástica y magnética almacenada en esa estructura. Tales estructuras complejas que cambian de forma podrían tener un gran potencial para el Ejército, porque pueden ayudar a crear robots blandos, robots con extremidades flexibles similares a los organismos naturales. En comparación con la generación actual de robots rígidos, Los robots blandos podrían moverse con mucha más destreza en un terreno de campo de batalla complejo, ", dijo el Dr. Alex Hsieh del Laboratorio de Investigación del Ejército.
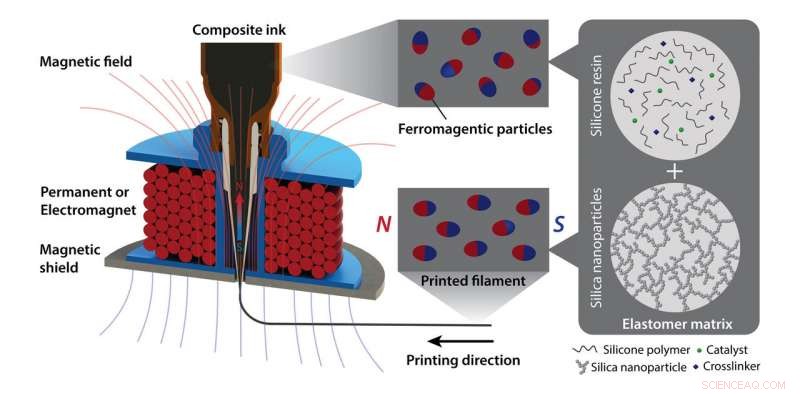
Los esquemas del proceso de impresión y la composición del material. Las partículas ferromagnéticas incrustadas en la tinta compuesta son reorientadas por el campo magnético aplicado antes de la impresión. Crédito:Ejército de EE. UU.
Esta tecnología puede permitir que el futuro Ejército fabrique estructuras magnéticas impresas en 3-D que puedan arrastrarse, rollo, saltar o agarrarse en apoyo de las necesidades relevantes del Ejército. Este esfuerzo de investigación permite controlar la orientación magnética de los nuevos dispositivos impresos en 3D para que puedan cambiar rápidamente a nuevas formaciones intrincadas o moverse a medida que varias secciones responden a un campo magnético externo. Las funciones demostradas a partir de estos complejos cambios de forma incluyen electrónica suave reconfigurable, metamaterial mecánico que puede saltar y un robot blando que puede gatear, rollo, atrapar objetos que se mueven rápidamente o entregar productos farmacéuticos.
Aunque otros grupos han fabricado materiales activados magnéticamente para lograr movimientos simples, Este nuevo enfoque permite tanto el modelado como el diseño de secciones de dispositivos controlados magnéticamente para realizar tareas robóticas complejas relevantes para el Ejército.
El enfoque se basa en la escritura directa con tinta de un compuesto de elastómero que contiene micropartículas ferromagnéticas y la aplicación de un campo magnético a la boquilla dispensadora durante la impresión. La técnica reorienta las partículas a lo largo del campo aplicado para impartir una polaridad magnética modelada a los filamentos impresos. Este método permite a los investigadores programar dominios ferromagnéticos en materiales blandos complejos impresos en 3D para permitir un conjunto de modos de transformación previamente inaccesibles. La velocidad de actuación y la densidad de potencia de los materiales blandos impresos con dominios ferromagnéticos programados son órdenes de magnitud mayores que los materiales activos impresos en 3D existentes.
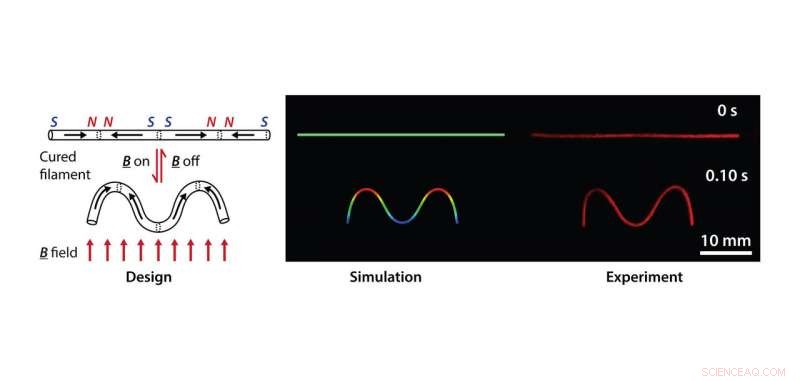
Simulación del modelo de elementos finitos y resultados experimentales (en rojo) de una sola fibra codificada con dominios magnéticos alternos diseñados para formar una forma de 'm'. Crédito:MIT
"Hemos desarrollado una plataforma de impresión y un modelo predictivo para que otros lo utilicen. Las personas pueden diseñar su propia estructura y patrones de dominio, validarlos con el modelo, e imprimirlos para activar varias funciones. Programando información compleja de estructura, dominio, y campo magnético, incluso se pueden imprimir máquinas inteligentes como robots, "dijo el profesor del MIT Xuanhe Zhao, investigador del ISN del Ejército.