Un nuevo modelo de computadora imita tan bien el polvo lunar que podría conducir a teleoperaciones de robots lunares más fluidas y seguras. La herramienta, desarrollada por investigadores de la Universidad de Bristol y con sede en el Laboratorio de Robótica de Bristol, podría usarse para entrenar a los astronautas antes de las misiones lunares.
Su investigación se publica en la revista Frontiers in Space Technologies. .
Trabajando con su socio industrial, Thales Alenia Space en el Reino Unido, que tiene un interés específico en crear sistemas robóticos funcionales para aplicaciones espaciales, el equipo investigó una versión virtual del regolito, otro nombre para el polvo lunar.
El regolito lunar es de particular interés para las próximas misiones de exploración lunar planificadas para la próxima década. De allí, los científicos pueden potencialmente extraer recursos valiosos, como oxígeno, combustible para cohetes o materiales de construcción, para sustentar una presencia a largo plazo en la Luna.
Para recolectar regolito, los robots operados a distancia surgen como una opción práctica debido a sus menores riesgos y costos en comparación con los vuelos espaciales tripulados. Sin embargo, operar robots a lo largo de estas grandes distancias introduce grandes retrasos en el sistema, lo que los hace más difíciles de controlar.
Ahora que el equipo sabe que esta simulación se comporta de manera similar a la realidad, pueden usarla para reflejar el funcionamiento de un robot en la luna. Este enfoque permite a los operadores controlar el robot sin demoras, proporcionando una experiencia más fluida y eficiente.
El autor principal Joe Louca, de la Escuela de Ingeniería, Matemáticas y Tecnología de Bristol, explicó:"Piense en ello como un videojuego realista ambientado en la Luna:queremos asegurarnos de que la versión virtual del polvo lunar se comporte igual que la realidad, de modo que si lo usamos para controlar un robot en la luna, entonces se comportará como esperamos. Este modelo es preciso, escalable y liviano, por lo que puede usarse para respaldar las próximas misiones de exploración lunar".
Este estudio surge de un trabajo anterior del equipo, que encontró que los operadores de robots expertos quieren capacitarse en sus sistemas con un riesgo y un realismo que aumentan gradualmente. Eso significa comenzar con una simulación y llegar al uso de maquetas físicas, antes de pasar a utilizar el sistema real. Un modelo de simulación preciso es crucial para capacitar y desarrollar la confianza del operador en el sistema.
Si bien anteriormente se habían desarrollado algunos modelos especialmente precisos de polvo lunar, son tan detallados que requieren mucho tiempo de cálculo, lo que los hace demasiado lentos para controlar un robot sin problemas. Investigadores del DLR (Centro Aeroespacial Alemán) abordaron este desafío desarrollando un modelo virtual de regolito que considera su densidad, pegajosidad y fricción, así como la gravedad reducida de la luna. Su modelo es de interés para la industria espacial, ya que requiere pocos recursos computacionales y, por lo tanto, puede ejecutarse en tiempo real. Sin embargo, funciona mejor con pequeñas cantidades de polvo lunar.
Los objetivos del equipo de Bristol eran, en primer lugar, ampliar el modelo para que pueda soportar más regolito, manteniendo al mismo tiempo un peso lo suficientemente ligero como para funcionar en tiempo real, y luego verificarlo experimentalmente.
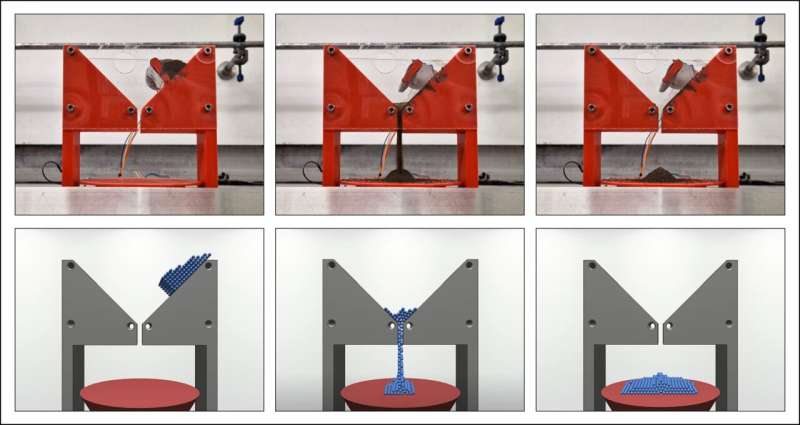
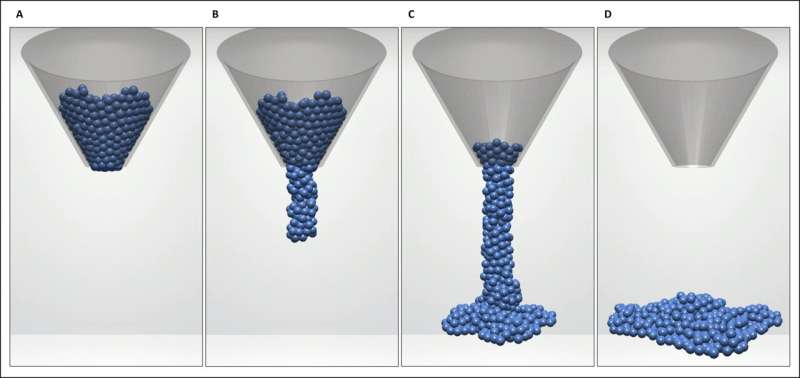
Louca añadió:"Nuestro objetivo principal a lo largo de este proyecto fue mejorar la experiencia del usuario para los operadores de estos sistemas. ¿Cómo podríamos facilitar su trabajo? Comenzamos con el modelo de regolito virtual original desarrollado por DLR y lo modificamos para hacerlo más escalable. Luego, llevamos a cabo una serie de experimentos, la mitad en un entorno simulado y la otra mitad en el mundo real, para medir si el polvo lunar virtual se comportaba igual que su contraparte del mundo real".
Como este modelo de regolito promete ser lo suficientemente preciso, escalable y liviano para usarse en tiempo real, el equipo investigará a continuación si se puede usar cuando se operan robots para recolectar regolito.
También planean investigar si se podría desarrollar un sistema similar para simular el suelo marciano, lo que podría resultar beneficioso para futuras misiones de exploración, o formar científicos para manipular material de la muy esperada misión Mars Sample Return.
Más información: Joe Louca et al, Verificación de un simulante virtual de regolito lunar, Fronteras en tecnologías espaciales (2024). DOI:10.3389/frspt.2024.1303964
Proporcionado por la Universidad de Bristol