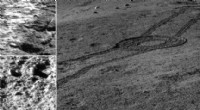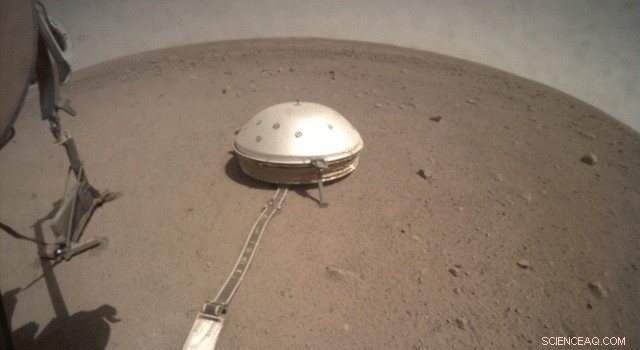
El 28 de junio 2019, El módulo de aterrizaje InSight de la NASA usó su brazo robótico para mover la estructura de soporte de su instrumento de excavación, informalmente llamado el "topo". Esta vista fue capturada por la cámara de contexto del instrumento ojo de pez debajo de la cubierta del módulo de aterrizaje. Crédito:NASA / JPL-Caltech
He aquí el "topo":el pico de detección de calor que el módulo de aterrizaje InSight de la NASA desplegó en la superficie marciana ahora es visible. La semana pasada, El brazo robótico de la nave espacial eliminó con éxito la estructura de soporte del topo, que no ha podido cavar, y lo colocó a un lado. Quitar la estructura le da al equipo de la misión una vista del topo, y tal vez una forma de ayudarlo a excavar.
"Hemos completado el primer paso de nuestro plan para salvar al topo, "dijo Troy Hudson de un científico e ingeniero de la misión InSight en el Laboratorio de Propulsión a Chorro de la NASA en Pasadena, California. "Aún no hemos terminado. Pero por el momento, todo el equipo está eufórico porque estamos mucho más cerca de hacer que el topo vuelva a moverse ".
Parte de un instrumento llamado Paquete de propiedades físicas y flujo de calor (HP3), el topo auto-martillante está diseñado para cavar hasta 16 pies (5 metros) y tomar la temperatura de Marte. Pero el topo no ha podido cavar más de 12 pulgadas (30 centímetros), así que el 28 de febrero En 2019, el equipo ordenó al instrumento que dejara de martillar para que pudieran determinar un camino a seguir.
Los científicos e ingenieros han estado realizando pruebas para salvar al topo en el JPL, que lidera la misión InSight, así como en el Centro Aeroespacial Alemán (DLR), que proporcionó HP3. Basado en pruebas DLR, es posible que el suelo no proporcione el tipo de fricción para el que fue diseñado el topo. Sin fricción para equilibrar el retroceso del movimiento de martilleo automático, el topo simplemente rebotaría en su lugar en lugar de excavar.
Una señal de este tipo de suelo inesperado es evidente en las imágenes tomadas por una cámara en el brazo robótico:se ha formado un pequeño hoyo alrededor del lunar mientras martillaba en su lugar.
"Las imágenes que regresan de Marte confirman lo que hemos visto en nuestras pruebas aquí en la Tierra, ", dijo Mattias Grott, científico del proyecto HP3, de DLR." Nuestros cálculos fueron correctos:este suelo cohesivo se está compactando en las paredes como los martillos topo ".
El equipo quiere presionar el suelo cerca de este pozo con una pequeña pala en el extremo del brazo robótico. La esperanza es que esto colapse el pozo y proporcione la fricción necesaria para que el topo excave.
También es posible que el topo haya chocado contra una roca. Mientras que el topo está diseñado para empujar pequeñas rocas fuera del camino o desviarlas a su alrededor, los más grandes evitarán el avance del pico. Es por eso que la misión seleccionó cuidadosamente un lugar de aterrizaje que probablemente tendría menos rocas en general y más pequeñas cerca de la superficie.
La garra del brazo robótico no está diseñada para levantar el topo una vez que está fuera de su estructura de soporte, por lo que no podrá reubicar el topo si una roca lo bloquea.
El equipo discutirá los próximos pasos a seguir basándose en un análisis cuidadoso. A finales de este mes, después de soltar la grapa del brazo de la estructura de soporte, traerán una cámara para algunas imágenes detalladas del topo.