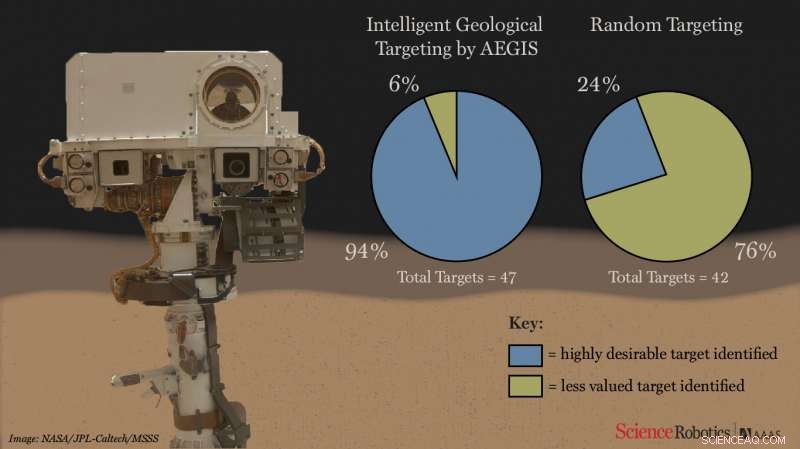
Tomando solo 21, 000 del total de 3,8 millones de líneas de código de la misión Curiosity, AEGIS seleccionó con precisión los objetivos deseados en 2,5 kilómetros de terreno marciano inexplorado el 93% del tiempo, en comparación con el 24% esperado sin el software. En este caso, el objetivo deseado era un afloramiento, un tipo de roca marciana ideal para analizar la historia geológica del planeta rojo. Crédito:Carla Schaffer / AAAS
(Phys.org):un equipo de investigadores de EE. UU., Dinamarca y Francia han elaborado un informe sobre la creación y el uso de software destinado a dar más autonomía a los robots exploratorios en el espacio. En su artículo publicado en la revista Ciencia Robótica , el equipo describe el software, llamado Exploración autónoma para recopilar más ciencia (AEGIS), y qué tan bien funcionó en el rover Curiosity de Marte.
Debido a su poder de cómputo limitado y a su distancia de la Tierra, Los científicos espaciales creen que sería ventajoso que los robots exploratorios tuvieran la capacidad de seleccionar qué cosas estudiar. También permitiría realizar más investigaciones cuando un robot no puede comunicarse con la Tierra, como cuando está en la cara opuesta de un planeta. Sin tal sistema, un robot tendría que escanear una región, fotografiarlo, envíe las imágenes fotográficas de regreso a la Tierra y luego espere instrucciones sobre qué hacer. Con tal sistema, un robot como Curiosity podría escanear el horizonte, elija un objeto para estudiar y luego conduzca y estudie. Este enfoque ahorraría mucho tiempo, permitiendo al robot estudiar más objetos antes de que expire su vida útil. Por eso, La NASA encargó a un equipo la creación de dicho software, que finalmente se convirtió en AEGIS. El software se probó y luego se cargó en Curiosity en mayo de 2016 y se usó 54 veces durante los siguientes 11 meses.
El software permite al móvil controlar lo que se ha denominado ChemCam, que es un dispositivo que se utiliza para estudiar rocas u otras características geológicas:se dispara un láser a un objetivo y luego los sensores miden los gases que se producen como resultado.
Los investigadores informan que encontraron que el sistema tiene una precisión del 93 por ciento en comparación con el 24 por ciento sin su uso. El software, ellos reclaman, ahorró muchas horas de tiempo de misión, que se utilizó para participar en otras actividades útiles, como estudiar el contenido de meteoritos. También informan que el software permitió un aumento en la orientación de ChemCam de 256 por día a 327, lo que significó que se recopilaron más datos en la misma cantidad de tiempo.

(A) La mirada de ChemCam. (B) ChemCam dispara láseres a las rocas para analizar su contenido, dejando marcas visibles tanto en la superficie (arriba a la derecha) como en el interior del taladro de 16 mm de diámetro (centro) de este sitio de perforación “Windjana”. (C) Objetivos de suelo medidos por ChemCam. (D) El Micro-Imager remoto en ChemCam toma fotos de alto enfoque de objetivos distantes, como esta zona del abanico aluvial Peace Vallis, aproximadamente a 25 km. Crédito:Francis et al., Sci. Robot. 2, eaan4582 (2017)
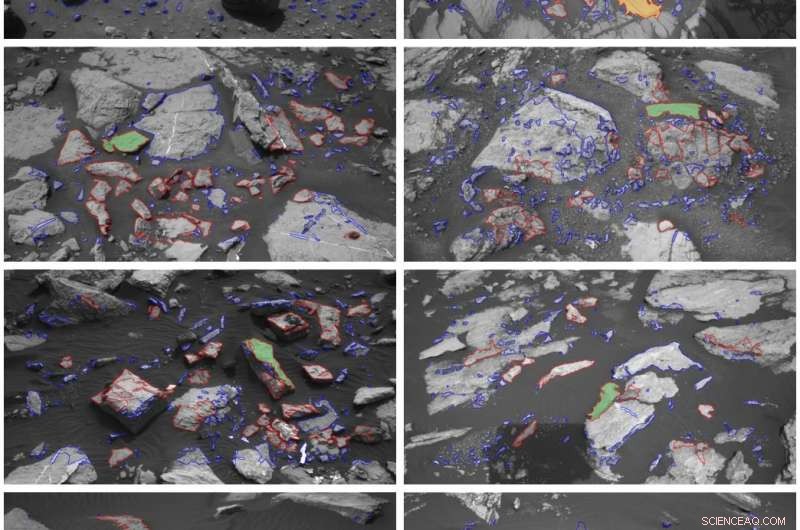
Ejemplos de selección de objetivos AEGIS, recolectado desde el día marciano 1400 hasta 1660. Los blancos señalados en azul fueron rechazados; los delineados en rojo se conservaron. Los objetivos mejor clasificados están sombreados en verde, y los objetivos en segundo lugar están sombreados en naranja. Crédito:Francis et al., Sci. Robot. 2, eaan4582 (2017)
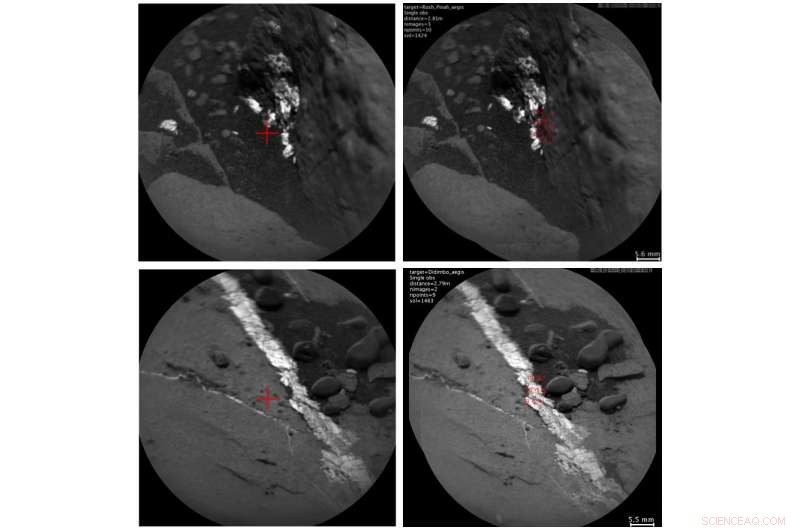
Ejemplos de AEGIS que corrigen comandos humanos que no dan en el blanco, llamado "refinamiento de apuntado autónomo". (A, C) Blancos calculados por humanos en rojo. (B, D) Refinamiento de blancos por AEGIS indicado en rojo. Crédito:Francis et al., Sci. Robot. 2, eaan4582 (2017)
© 2017 Phys.org