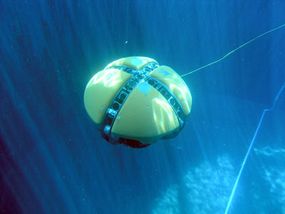
 El vehículo submarino autónomo DEPTHX Foto © Stone Aerospace / PSC, C ª.
El vehículo submarino autónomo DEPTHX Foto © Stone Aerospace / PSC, C ª. ¿Qué necesitarías para explorar un océano en Europa? una de las lunas de Júpiter? Está a cientos de millones de millas de distancia y el océano se encuentra bajo una capa de hielo de al menos 10 kilómetros (6 millas) de espesor. Probablemente necesitarías una nave espacial para aterrizar en el hielo, una forma de perforar el hielo, y un vehículo sumergible para explorar el océano y relacionar los hallazgos con la Tierra.
Este vehículo sumergible es un proyecto que ocupa los esfuerzos del Dr. Bill Stone, CEO de Stone Aerospace en Austin, Texas. Stone y sus colegas han desarrollado un prototipo vehículo submarino autónomo (AUV) llamado Explorador térmico freático profundo (DEPTHX) para exploración remota y actualmente lo están probando en una gran cueva submarina. En este articulo, examinaremos este revolucionario AUV, su misión y cómo encaja en el esquema más amplio de exploración extraterrestre.
El proyecto DEPTHX es uno de una serie financiada por la NASA para desarrollar sondas robóticas capaces de explorar Europa (discutiremos por qué Europa es un objetivo tan interesante más adelante). Stone Aerospace diseñado, construyó y opera DEPTHX en cooperación con sus socios:
 PROFUNDIDADX en cubierta durante una de sus pruebas Foto © Stone Aerospace / PSC, C ª.
PROFUNDIDADX en cubierta durante una de sus pruebas Foto © Stone Aerospace / PSC, C ª. El proyecto DEPTHX está diseñado para responder a estas preguntas:
DEPTH X ha completado las pruebas de tanques (que incluyen integración de sistemas y mapeo) y ahora se está preparando para someterse a pruebas en un entorno completamente desconocido:el Zacatón de México. cenote .
Próximo, echemos un vistazo más de cerca al AUV y sus sistemas.
Cenotes
Los cenotes (pronunciado "say-NO-tay") son grandes sumideros de agua dulce que se encuentran en la península de Yucután en México. Estos cenotes se formaron cuando el agua subterránea se grabó en el poroso caliza lecho rocoso que compone toda la península. El cenote en Zacáton es uno de los cinco cenotes conectados y se cree que es el más profundo del mundo. Zacáton también tiene manantial hidrotermal dentro de eso.
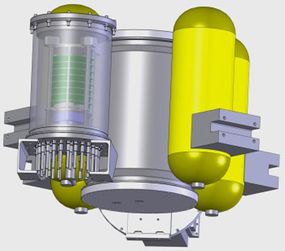
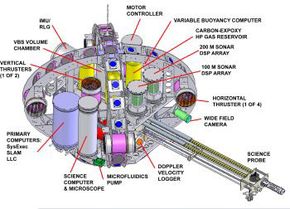 DEPTHX estructuras internas Imagen © Stone Aerospace / PSC, C ª.
DEPTHX estructuras internas Imagen © Stone Aerospace / PSC, C ª. El DEPTHX AUV tiene forma de huevo, con un eje largo de 4,26 metros (13,97 pies), un eje corto de 3,04 m (9,97 pies), y un peso de 1,3 toneladas métricas (1,43 toneladas cortas). Puede moverse libremente, flotar y pista de pared en tres dimensiones sin ningún comando externo. DEPTHX tiene una velocidad de crucero mínima de 0,2 metros por segundo (0,65 pies por segundo) para el mapeo y puede llegar a una profundidad de 1, 000 m (3, 280 pies). Para operar de forma autónoma, DEPTHX debe poder hacer lo siguiente:
 Un primer plano de un propulsor DEPTHX Imagen © Stone Aerospace / PSC, C ª.
Un primer plano de un propulsor DEPTHX Imagen © Stone Aerospace / PSC, C ª. DEPTHX tiene seis propulsores (cuatro horizontales y dos verticales), que le permiten maniobrar en tres dimensiones. El vehículo se puede maniobrar con solo dos de los propulsores horizontales y uno vertical; los extras son de respaldo.
DEPTHX también puede flotar. Para mantener su posición, podría usar los propulsores, pero esto consumiría rápidamente una valiosa energía de la batería. En lugar de, el vehículo está equipado con dos motores de flotabilidad variable (VBE) . Una computadora VBE detecta la presión, temperatura y salinidad (contenido de sal) del agua circundante y calcula la flotabilidad de la embarcación. Luego, la computadora abre o cierra válvulas que permiten que las bombas o el gas presurizado dejen entrar o salir el agua. Al igual que con los propulsores, hay redundancia incorporada y el DEPTHX puede flotar usando solo un VBE.
 Los motores de flotabilidad variable permiten que DEPTHX flote. Imagen © Stone Aerospace / PSC, C ª.
Los motores de flotabilidad variable permiten que DEPTHX flote. Imagen © Stone Aerospace / PSC, C ª. 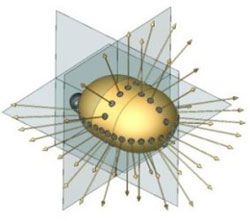 Matriz geométrica de la capacidad del sensor de sonda de DEPTHX Imagen © Stone Aerospace / PSC, C ª.
Matriz geométrica de la capacidad del sensor de sonda de DEPTHX Imagen © Stone Aerospace / PSC, C ª. DEPTHX tiene 54 sensores de sonda espaciados alrededor de su marco y controlados por dos matrices de sonar . El sonar utiliza pulsos de ondas sonoras de alta energía y sus reflejos para localizar objetos dentro de un radio de 250 a 300 metros del vehículo. La información que recopila se transmite a las computadoras a bordo para el control de la navegación.
Además del sonar, DEPTHX navega usando acelerómetros, medidores de profundidad y una unidad de guía inercial. Un registrador de velocidad Doppler determina qué tan rápido se mueve el vehículo y envía esta información a la computadora principal, que ajusta la velocidad del vehículo.
A medida que DEPTHX se mueve, las computadoras usan la información de la sonda para crear imágenes en 3-D, que se superponen en la memoria de la computadora para hacer un mapa geométrico progresivo. La técnica se llama Localización y mapeo simultáneos (SLAM) . Bill Stone y sus colegas desarrollaron un dispositivo SLAM propulsado por buzos que utilizaron para mapear el acuífero de Wakulla Springs en Florida. DEPTHX utiliza su mapa internalizado para la navegación de modo que pueda moverse a cualquier lugar específico sin la ayuda de navegación externa, como GPS.
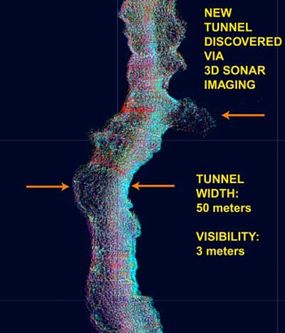 Mapa de una parte del acuífero de Wakulla Springs obtenido por Stone Aerospace Imagen © Stone Aerospace / PSC, C ª.
Mapa de una parte del acuífero de Wakulla Springs obtenido por Stone Aerospace Imagen © Stone Aerospace / PSC, C ª. DEPTHX tiene varias computadoras a bordo dedicadas a tareas específicas. Uno controla las operaciones del vehículo, SLAM y navegación; uno controla los VBE; y uno controla experimentos y analiza datos. En total, estas computadoras contienen más de 30 microprocesadores, desde controladores de 8 bits hasta chips Pentium 4. DEPTHX está programado para funcionamiento y análisis autónomos.
DEPTHX tiene dos torres de baterías que comprenden baterías de iones de litio recargables. Las baterías proporcionan hasta ocho horas de energía.
 El DEPTHX AUV bajo el agua Imagen © Stone Aerospace / PSC, C ª.
El DEPTHX AUV bajo el agua Imagen © Stone Aerospace / PSC, C ª. Puede comunicarse por WiFi en la superficie y por un solo cable de fibra óptica mientras está sumergido. El cable se utiliza para cargar datos o recibir comandos de control cuando sea necesario.
DEPTHX utilizará sus tecnologías SLAM para crear mapas e imágenes mientras explora. Tiene una cámara de imágenes de campo amplio y también podrá realizar mediciones ambientales como la temperatura, presión y concentraciones de diversos productos químicos. También es un brazo extensible con una sonda científica que le permitirá recolectar muestras líquidas y sólidas y un microscopio de presión a bordo para ayudar en la detección de vida microbiana.
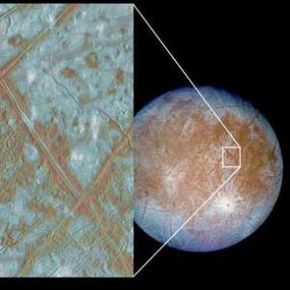 Las balsas de hielo de Europa son bloques de hielo que muestran que Europa pudo haber tenido un océano subterráneo en el pasado. Imagen cortesía del Laboratorio de Propulsión a Chorro de la NASA
Las balsas de hielo de Europa son bloques de hielo que muestran que Europa pudo haber tenido un océano subterráneo en el pasado. Imagen cortesía del Laboratorio de Propulsión a Chorro de la NASA Entonces, ¿Por qué Europa? una luna interior de Júpiter, ¿Un objetivo tan interesante para la exploración? Las sondas espaciales Voyager y Galileo mostraron que Europa estaba cubierta por una capa de hielo. Debido a que Europa está tan cerca de Júpiter, la gravedad del planeta tira de él, alternativamente estirando y comprimiendo la luna en su órbita. Estas fuerzas gravitacionales crean calor dentro de la luna. Este calor se escapa a través de la actividad volcánica y podría calentar la parte inferior de la capa de hielo, creando un océano líquido.
La evidencia de un océano líquido existe en el patrón fracturado de la capa de hielo, que tiene 10 kilómetros (6.21 millas) de espesor. Se pueden ver patrones similares en la capa de hielo del Ártico vista por los satélites desde la órbita de la Tierra. Las mediciones del campo magnético indican que el futuro océano podría ser salado. También, los cálculos indican que hay una cantidad suficiente de calor generado por las fuerzas de las mareas para hacer un océano líquido.
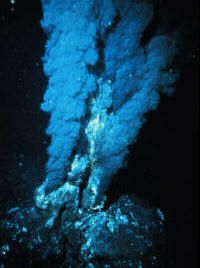 Respiradero hidrotermal en el fondo del océano Imagen cortesía de NOAA / Departamento de Comercio de EE. UU.
Respiradero hidrotermal en el fondo del océano Imagen cortesía de NOAA / Departamento de Comercio de EE. UU. Si existe un océano líquido y existe actividad volcánica de las fuerzas de las mareas, entonces puede haber respiraderos hidrotermales en el suelo del "océano", como los que se encuentran en la Tierra cerca de las dorsales oceánicas.
En la tierra, sabemos que muchas formas de vida diversas sobreviven alrededor de los respiraderos hidrotermales en comunidades que se basan en quimiosíntesis , la formación de compuestos orgánicos utilizando energía geotérmica. Las bacterias quimiosintéticas forman la base de la cadena alimentaria en estas comunidades. Otros organismos dentro de estas comunidades incluyen gusanos tubulares gigantes, almejas, cangrejos y peces.
Astrobiólogos cree que la vida necesita agua líquida, compuestos (orgánicos) que contienen carbono, y una fuente de energía. Europa parece tener estos ingredientes también y, por lo tanto, podría tener vida.
Entonces, una misión a Europa incluiría un AUV que podría explorar el océano, realizar experimentos científicos y transmitir los resultados a la Tierra.
Aerospace planea construir un vehículo posterior llamado AGUANTE , que irá un paso más allá. Será más pequeño, pero tan capaz como DEPTHX. La prueba de ENDURANCE será explorar un lago en la Antártida que está sumergido debajo de la capa de hielo. Actualmente, la NASA está desarrollando la tecnología para derretir kilómetros de hielo en el lago. La RESISTENCIA se bajará a través del pozo de fusión hacia el lago para su exploración utilizando principios y tecnologías científicos, desarrollado y probado por DEPTHX.
Para obtener mucha más información sobre DEPTHX y temas relacionados, consulte los enlaces en la página siguiente.
Fuentes














