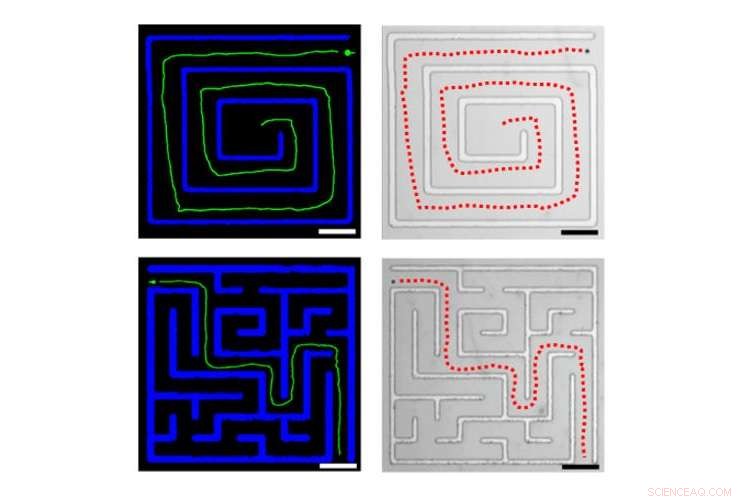
Trayectorias de un microvehículo a través de laberintos. El camino está planificado por un sistema de inteligencia artificial y el microvehículo está guiado por campos magnéticos. Crédito:Li et al. © 2017 Sociedad Química Estadounidense
(Phys.org) —En un nuevo estudio, Los científicos han desarrollado la versión a microescala de los vehículos autónomos:un micromotor esférico de 5 μm que navega de forma autónoma a través del micro-tráfico a lo largo de un micro-laberinto para llegar a su destino final. Los investigadores esperan que estos "microvehículos inteligentes" tengan aplicaciones potenciales en tareas biomédicas, como administrar medicamentos a las células tumorales mientras se evitan las células sanas.
Los científicos, dirigido por Longqiu Li en el Instituto de Tecnología de Harbin en China, y Joseph Wang de la Universidad de California en San Diego en EE. UU., han publicado un artículo sobre los microvehículos inteligentes en un número reciente de ACS Nano .
"Hemos integrado la inteligencia artificial en un micro / nanorobot, "Li dijo Phys.org . "Presentamos un microvehículo inteligente para una navegación autónoma precisa en entornos complicados y que cambian dinámicamente a través de una planificación de ruta óptima. Similar a sus contrapartes de vehículos grandes, la navegación autónoma de los microvehículos implica un movimiento sin colisiones en entornos dinámicos ".
Hasta ahora, Las micro y nanomáquinas se han restringido a la navegación que utiliza un sistema de control de circuito cerrado, en el que las máquinas solo pueden moverse a lo largo de una ruta predefinida. El nuevo estudio marca la primera demostración de micromáquinas que pueden navegar de forma autónoma en complejos, entornos que cambian dinámicamente, como los que tienen otras micromáquinas en movimiento.
El proceso de navegación autónoma consta de tres pasos principales. Una cámara CCD conectada a un microscopio toma fotografías y las envía a un procesador de extracción de características, que identifica obstáculos y construye un mapa del entorno. Luego, el mapa se envía como entrada a un planificador de inteligencia artificial (IA), que utiliza un algoritmo de búsqueda de ruta y un enfoque de lógica difusa para determinar la ruta libre de colisiones más corta entre las múltiples rutas posibles hacia el destino. Luego, el planificador de IA envía estas direcciones de viaje a un generador de campo magnético, que orienta un campo magnético de tal manera que dirija el microvehículo a lo largo de la ruta libre de colisiones.
El planificador de IA, que está en el corazón del sistema de navegación inteligente, también puede detectar cuando el microvehículo se desvía de su ruta planificada, que puede ocurrir debido a la presencia de ruido. En estos casos, el planificador de IA puede medir simultáneamente el error y guiar el microvehículo de regreso al camino.
Una de las principales aplicaciones de este tipo de microvehículos inteligentes puede estar en el campo biomédico para tareas como el diagnóstico de enfermedades, entrega de medicamentos, y cirugía de precisión. Demostrar, los investigadores demostraron que el microvehículo puede usar la cámara para detectar y distinguir entre las células cancerosas, las células rojas de la sangre, y células mixtas, reconociendo las diferencias en su tamaño y forma. El planificador de IA luego considera las células cancerosas como los objetivos y las otras células como los obstáculos, y planifica un camino en consecuencia.
"Queremos aplicar los sistemas micro / nanorobóticos en el campo de las operaciones biomédicas y la manipulación a nanoescala, "Dijo Li.
En el futuro, los científicos planean desarrollar microvehículos autónomos más sofisticados, con características como frenado autónomo, control de "crucero", mantenimiento de carril, y la capacidad de interactuar con el medio ambiente.
© 2017 Phys.org