Las tecnologías investigadas en el proyecto SeaClear se están probando en el puerto de Hamburgo, entre otros. Crédito:HPA
Ochenta y seis millones de toneladas métricas de plásticos terminan en los océanos cada año, con devastadoras consecuencias para la vida marina, naturaleza y, por último, para nosotros los humanos. Las vastas manchas flotantes de plástico que cubren la superficie del agua, algunos tan grandes como países enteros, son solo la punta del iceberg. Alrededor del 90 por ciento de esta basura termina en el fondo marino. El Centro Fraunhofer de Servicios y Logística Marítima CML y una red internacional de socios quieren ser los primeros en arreglar este lío con un proyecto llamado SeaClear. A continuación, se presenta una entrevista con los jefes de proyecto Johannes Oeffner y Cosmin Delea.
Su objetivo es recolectar basura en el fondo marino en el proyecto SeaClear. ¿Por qué?
Oeffner:La contaminación marina es uno de los problemas mundiales más importantes. Afecta al medio ambiente, la economía, seguridad, salud y cultura. Los plásticos no se degradan fácilmente, por lo que es probable que permanezcan en el mar durante cientos de años. Teniendo en cuenta que los pronósticos esperan que la producción de plástico se cuadruplique para 2050, tendremos un gran problema si no tomamos medidas. Según el Foro Económico Mundial WEF, la proporción de plástico por pescado en 2014 era de uno a cinco; para 2050 podría haber tantos desechos plásticos como peces.
Se han propuesto muchos enfoques para eliminar los desechos plásticos de la superficie de los mares. Cual es tu concepto?
Oeffner:Primero nos concentramos en limpiar el lecho marino, especialmente en las zonas costeras donde la contaminación es particularmente intensa. En el concepto SeaClear, estamos haciendo uso de varios vehículos robóticos que están conectados entre sí. Una nave nodriza autónoma o teledirigida (vehículo de superficie no tripulado, USV) es compatible con dos robots submarinos (vehículo operado a distancia, ROV) y un vehículo aéreo o dron (vehículo aéreo no tripulado, UAV). Desplegamos el dron y un robot para trazar la basura en la superficie y en la columna de agua. El segundo ROV hace uso de esta información y utiliza una pinza de diseño personalizado y un dispositivo de succión para recolectar la basura mapeada en el lecho marino y desecharla en un contenedor colectivo.

Gracias al proyecto SeaClear, la costa de Dubrovnik se liberará de los desechos submarinos en el futuro. Crédito:DUNEA
¿Qué tecnologías hay detrás de todo esto?
Delea:utilizamos métodos de control de agentes múltiples para que los robots heterogéneos dirijan de forma sincrónica todos los vehículos autónomos. Esto significa que los otros robots reconocen el cambio de posición de un robot. Cada robot tiene la capacidad incorporada para adaptarse a estos cambios sin intervención humana. Aunque emitimos un comando, está dirigido específicamente a un robot, mientras que los otros robots notarán el cambio de pose y reaccionarán si es necesario. Utilizamos algoritmos de aprendizaje profundo para detectar y distinguir los desechos de la fauna y la flora marinas. Específicamente, combinamos diferentes sistemas sensoriales como cámaras convencionales y multiespectrales o sensores acústicos para obtener datos relevantes sobre las aguas y, después de varias sesiones de entrenamiento, para detectar y clasificar en línea los residuos marinos.
¿Cómo se entrena a los robots autónomos?
Delea:la detección y clasificación requieren un entrenamiento intensivo. Los primeros pasos para ambos son utilizar información de fuentes disponibles públicamente, como grandes bases de datos en línea que proporcionan imágenes de la vida marina. Luego llevamos a cabo un entrenamiento adicional con objetivos ficticios. Antes de que tengan lugar las demostraciones finales, se realizan ensayos preliminares para evaluar su desempeño.
Las zonas costeras son muy diferentes. ¿Dónde se llevan a cabo estos ensayos?
Oeffner:Actualmente estamos probando las tecnologías en dos escenarios diferentes en dos ubicaciones a profundidades de 20 a 30 metros. Queremos demostrar el proceso mientras las operaciones portuarias están en marcha con la infraestructura existente y los procedimientos fijos en el puerto de Hamburgo. Es por ello que este escenario se centra en el área industrial del puerto. El escenario costero en Dubrovnik, Croacia, se dirige al sector turístico y tiene como objetivo específico la limpieza de aguas en los puntos de interés turístico. Las primeras pruebas se llevaron a cabo en ambos lugares en primavera. Están programadas más pruebas para Dubrovnik a fines del verano después de que las pruebas se suspendieran debido a la corona.
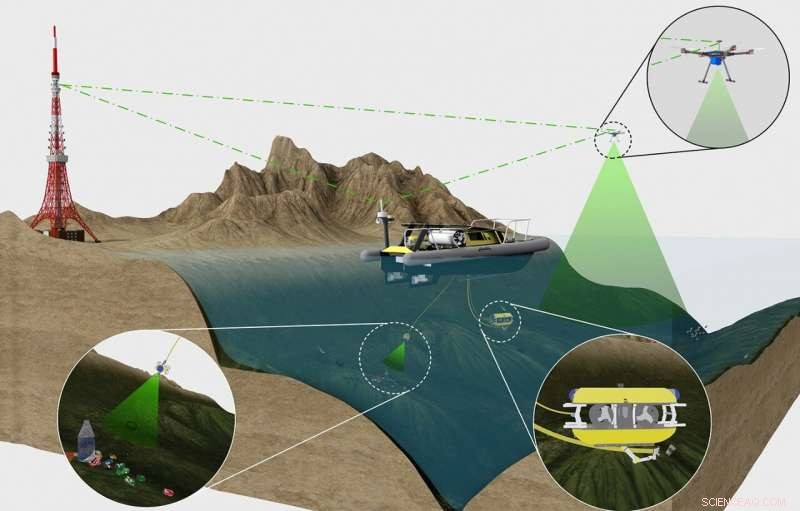
Varios vehículos robot están conectados entre sí en el sistema SeaClear. Una nave nodriza autónoma o controlada a distancia (UPS) en la superficie es apoyada por dos robots submarinos (ROV) y un avión no tripulado (UAV). Crédito:TUM
¿Cuáles son los mayores desafíos de este proyecto?
Delea:Los desafíos en los dos sitios de prueba son diferentes:las aguas de Hamburgo son muy difíciles de analizar debido a su turbidez y poca visibilidad. Es más, Actualmente no existen estadísticas claras sobre el tipo y la cantidad de desechos submarinos en la zona del puerto. Aquí es donde queremos desarrollar aún más la robustez y las características individuales del sistema SeaClear y prepararlo para el mercado. Para tal fin, hemos incorporado a partes interesadas del puerto de Hamburgo para que consideren SeaClear como un futuro servicio portuario. La gran dificultad en Dubrovnik es que no se puede restringir el acceso del público. Por otra parte, esto significa que serán necesarias una serie de medidas de seguridad adicionales, que deberá tomarse cuando el sistema se pruebe en el sitio. Pero la visibilidad en estas aguas es casi ideal, por lo que el objetivo principal es validar el sistema en general y mostrar su conjunto completo de características.
¿Cómo está abordando estos problemas?
Delea:en Hamburgo, Estamos tratando de fusionar datos de diferentes sensores al mapear la basura marina para evaluar qué tipo de basura submarina se encuentra en estas aguas. Utilizamos principalmente sensores acústicos debido a la visibilidad limitada. En Dubrovnik, vamos a instalar mecanismos de seguridad adicionales en el dron volador, con algo de ayuda de los sensores de la nave nodriza. El objetivo aquí es minimizar los problemas de seguridad y prevenir colisiones.
¿Y cómo va a garantizar que los ecosistemas frágiles como los arrecifes de coral no se dañen?
Delea:este problema no está presente en Hamburgo, mientras que el sitio de prueba croata también tiene pocos arrecifes de coral. Pero cuando se implemente el sistema SeaClear final, utilizará sensores ópticos e inteligencia artificial para distinguir los arrecifes de coral, Evite procedimientos difíciles / peligrosos para recolectar solo la basura.
¿Qué parte del proyecto es responsabilidad de Fraunhofer CML y quiénes son los otros socios de esta empresa?
Oeffner:CML es el coordinador técnico del proyecto y es responsable de integrar el sistema general, así como del diseño y desarrollo de la canasta submarina para contener los desechos recolectados. Y lo que es más, estamos desarrollando un centro de monitoreo virtual que envía comandos a los robots y difunde sus datos. El proyecto también incluye la configuración de la red de comunicaciones y la infraestructura del servidor necesaria para proporcionar los servicios SeaClear a los distintos clientes a través de interfaces web. El consorcio está compuesto por las Universidades Técnicas de Munich, Porcelana de Delft, Dubrovnik y Cluj-Napoca, así como SubSea Tech Marseille, la Autoridad Portuaria de Hamburgo y la Agencia de Desarrollo Regional DUNEA Dubrovnik. El objetivo es que las dos últimas organizaciones también operen y utilicen el sistema desarrollado una vez finalizado el proyecto.