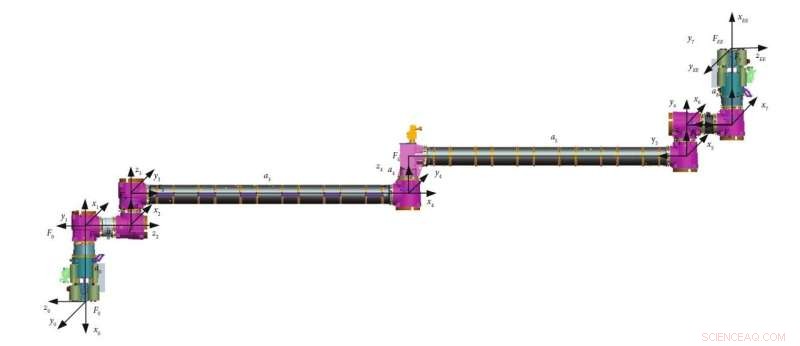
En la investigación, los resultados de la simulación de nuestro algoritmo de control adaptativo compuesto recursivo se presentan en comparación con el algoritmo de control adaptativo directo. Los marcos de coordenadas del manipulador de la Estación Espacial China se trazan aquí. Crédito:Espacio:ciencia y tecnología
En el proceso de construcción y mantenimiento de rutina de la Estación Espacial China, el manipulador juega un papel muy importante que puede realizar algunas tareas clave, como el acoplamiento de transposición, el mantenimiento diario y las actividades extravehiculares auxiliares. La alta precisión y el rendimiento dinámico del manipulador son necesarios para completar con éxito estas tareas, que a menudo se pueden mantener mediante controles diseñados en base al modelo dinámico.
Sin embargo, en las situaciones prácticas, normalmente no es realista obtener todos los parámetros de inercia con precisión. Por lo tanto, el control adaptativo se desarrolla para garantizar la convergencia del control de seguimiento incluso si el sistema tiene parámetros inciertos o que cambian lentamente. En un artículo de investigación publicado recientemente en Space:Science &Technology , el Dr. Li del State Key Laboratory of Management and Control for Complex Systems, propuso una nueva implementación recursiva de control adaptativo compuesto para manipuladores de robots.
Primero, el Dr. Li revisó el controlador adaptativo compuesto propuesto por Slotine y Li. El control adaptativo puede garantizar la convergencia del control de seguimiento incluso si el sistema tiene parámetros inciertos o que cambian lentamente. En general, este esquema se puede dividir en dos clases denominadas adaptación directa y adaptación indirecta según la señal que impulsa la ley de actualización de parámetros.
En la primera categoría, la actualización de parámetros está impulsada por los errores de seguimiento, mientras que en la segunda categoría, los parámetros se modifican de acuerdo con los errores de predicción, generalmente de los pares de torsión filtrados. El control adaptativo basado en errores de seguimiento generalmente puede garantizar una convergencia de seguimiento global; sin embargo, la convergencia de los parámetros estimados tiene condiciones más estrictas. En comparación, el control adaptativo indirecto tiene una velocidad de convergencia de parámetros más rápida, pero generalmente es difícil obtener la estabilidad de los errores de seguimiento.
Combinando los dos métodos, el conocido controlador adaptativo compuesto tiene las ventajas de ambos, en los que la adaptación de parámetros está impulsada tanto por errores de seguimiento como por errores de predicción. Sin embargo, la complejidad computacional de estos métodos de control adaptativo es una limitación principal en los manipuladores de robots prácticos, particularmente para el caso con un alto grado de libertad. Hasta el momento, sólo unos pocos trabajos han prestado atención a la ejecución recursiva del controlador indirecto adaptativo o compuesto adaptativo, probablemente porque el uso del error de predicción expresado por la matriz de regresión hace muy difícil reducir el orden de la complejidad computacional.
Para resolver las dificultades antes mencionadas, el Dr. Li reescribió la formulación de Newton-Euler usando la forma de matrices generales del clásico Algoritmo Recursivo de Newton-Euler. Luego, se diseña el método de control adaptativo compuesto recursivo y se verifica la estabilidad del método propuesto mediante la selección de una función de Lyapunov adecuada. La complejidad computacional de la adaptación compuesta recursiva propuesta es mucho menor que la de los estudios existentes. La razón es que en el controlador compuesto original, no se ha dedicado ninguna consideración a sus aspectos computacionales. Since the computational load of the proposed controllers is at the same scale as the recursive direct adaptive controllers, a comparison of between these two methods is conducted.
Results shows that the tracking errors are obviously decreased by using the recursive composite adaptive controller, and the parameter estimates converge faster with the recursive composite adaptive controller. In the simulation part, the manipulator of the Chinese Space Station is employed as a simulation example, and the results verify the effectiveness of the proposed recursive algorithm. Moreover, since the computational load is linear with the numbers of the joints, the proposed method is attractive especially for the redundant multijoint manipulator.