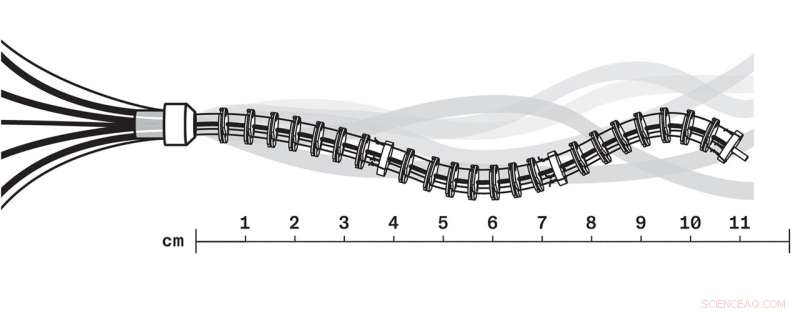
Los robots continuos "impulsados por tendones" que se muestran aquí tienen, en la vida real, unos siete milímetros de diámetro y están construidos en secciones que pueden variar en longitud de 15 a 70 milímetros. Otros modelos pueden ser incluso más estrechos. Todos exhiben un movimiento similar a un tentáculo. Crédito:Universidad de Toronto
Jessica Burgner-Kahrs, directora del Laboratorio de Robótica Continuum de la Universidad de Toronto Mississauga, y su equipo están construyendo robots muy delgados, flexibles y extensibles, de unos pocos milímetros de diámetro, para uso en cirugía e industria. Podrías llamarlo "zoobotics".
A diferencia de los robots humanoides, los llamados robots continuos cuentan con cuerpos largos y sin extremidades, similares a los de una serpiente, que les permiten acceder a lugares de difícil acceso.
Considere a un neurocirujano que necesita extirpar un tumor cerebral. Usando una herramienta quirúrgica tradicional y rígida, el cirujano tiene que llegar a la masa cancerosa siguiendo un camino recto hacia el cerebro, y corre el riesgo de penetrar y dañar el tejido vital.
Burgner-Kahrs, profesora asociada de ciencias matemáticas y computacionales en la U of T Mississauga, imagina un día en que uno de sus robots con forma de serpiente, guiado por un cirujano, podría tomar un camino sinuoso alrededor del tejido vital pero aun así alcanzar el sitio quirúrgico preciso. Los tumores cerebrales previamente inoperables pueden volverse operables de repente.
"Podría revolucionar la cirugía", dice ella.
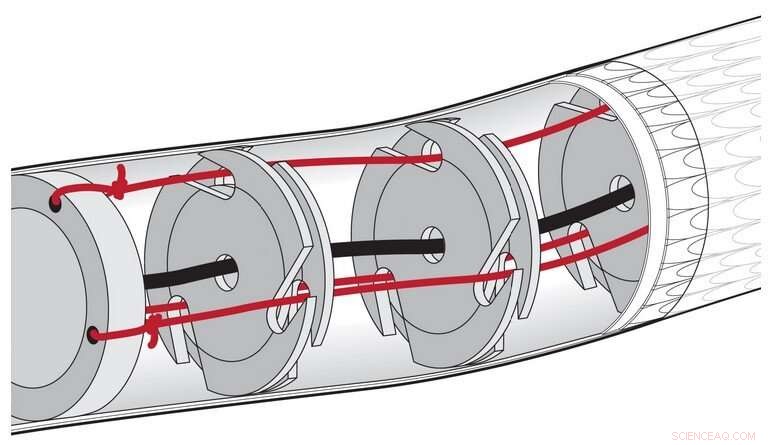
Los hilos que atraviesan el "cuerpo" del robot se unen a un disco más grueso al final de cada segmento del cuerpo. Estos hilos se tiran para controlar segmentos individuales del robot y doblarlos en diferentes direcciones. Los imanes dentro de cada disco, dispuestos con polaridades alternas, aseguran que los discos permanezcan equidistantes sin importar la longitud del segmento del robot. Esto ayuda al robot a doblarse como se desee y a recorrer un camino curvilíneo en un movimiento de "seguir al líder":el "cuerpo" con forma de serpiente sigue el camino de la "cabeza". El laboratorio ha desarrollado una funda de escamas superpuestas intercaladas entre dos capas de silicona. Cuando se aplica vacío entre las capas de silicona, el robot normalmente flexible se vuelve rígido. Crédito:Colin Hayes
Burgner-Kahrs, científica informática e ingeniera mecánica, dice que su laboratorio también está desarrollando una generación más avanzada de robots continuos que están equipados con sensores y que pueden conducirse parcialmente por sí mismos. Un cirujano tendría que operar el robot de forma remota con una computadora, pero el robot sabría cómo evitar obstáculos y reconocer su destino. Un cirujano podría desplegar uno de estos robots para recolectar una muestra de tejido del abdomen, por ejemplo, o inyectar un medicamento contra el cáncer directamente en un tumor en los pulmones.
También hay usos fuera del cuerpo humano.
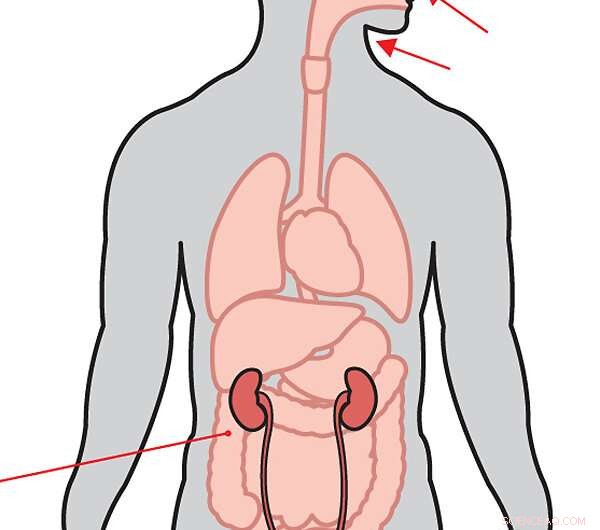
Burgner-Kahrs está desarrollando diferentes tipos de robots continuos que podrían usarse en cirugías mínimamente invasivas, causando incluso menos trauma a los pacientes que las técnicas quirúrgicas mínimamente invasivas actuales. Crédito:Colin Hayes
Un robot continuo podría deslizarse por el interior de un motor a reacción, inspeccionándolo en busca de daños. El laboratorio está experimentando con formas novedosas que son aún más diestras y extensibles. Un diseño reciente, con posibles aplicaciones de búsqueda y rescate, está inspirado en el origami:es muy liviano y puede alargarse hasta 10 veces más que otros diseños.
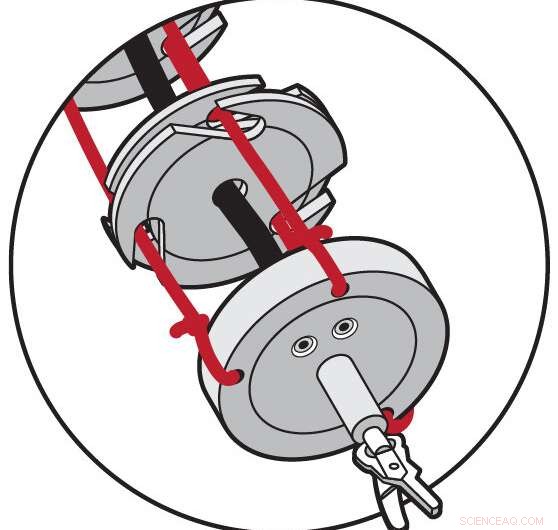
Los robots podrían estar equipados con cámaras, lo que permitiría al operador ver dónde está el robot. Se pueden montar pequeñas herramientas quirúrgicas según sea necesario, incluidos fórceps, un láser o un dispositivo de succión. Crédito:Colin Hayes
Robots continuos de próxima generación
Para desarrollar robots que puedan usarse de manera segura en una variedad de aplicaciones médicas y de otro tipo, Burgner-Kahrs tiene como objetivo responder las siguientes preguntas: