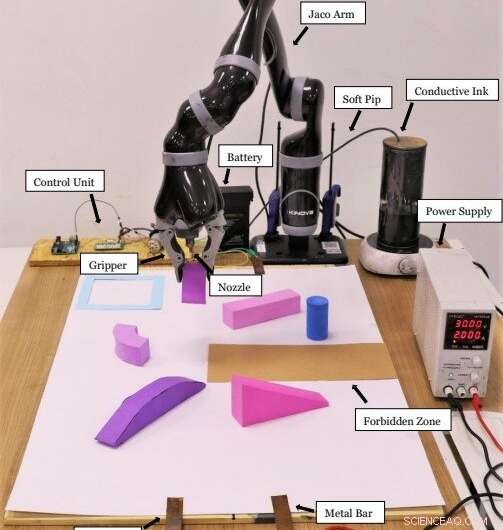
Configuración experimental del robot de dibujo de circuitos. El Kinova 6DOF Jaco Arm primero realiza acciones de recoger y colocar en la pose sugerida por la red. Luego, el brazo se mueve a una de las barras de metal a 5 cm por encima del cartón. El controlador ROS envía continuamente los waypoints de la ruta del circuito calculados a partir del algoritmo de planificación de ruta 3D. Luego, un Arduino recibe el estado del brazo a través de ROS y configura el encendido/apagado de la bomba peristáltica para controlar el flujo de tinta. La conexión comienza a mostrar conductividad después de que la tinta se seque (30 minutos). Crédito:Xianglong Tan, Zhikang Liu, Chen Yu, Andre Rosendo, Reorganización del entorno para maximizar la energía con el dibujo de un circuito robótico. arXiv:2111.08147v1 [cs.RO], https://arxiv.org/abs/2111.08147
Los avances tecnológicos recientes han allanado el camino para la creación de sistemas robóticos cada vez más sofisticados diseñados para completar misiones de forma autónoma en diferentes entornos familiares y desconocidos. Los robots destinados a operar en entornos inciertos o remotos podrían beneficiarse enormemente de la capacidad de adquirir activamente energía eléctrica de su entorno.
Investigadores del Instituto Politécnico de Worcester, el Imperial College de Londres y la Universidad de Illinois Urbana Champaign han desarrollado recientemente un nuevo sistema robótico que puede reorganizar visualmente su entorno para recibir la máxima cantidad de energía de una fuente de energía determinada. Este robot, presentado en un artículo prepublicado en arXiv y que se presentará en la Conferencia Internacional IEEE sobre Robótica y Biomimética, funciona dibujando circuitos eléctricos con tinta conductora.
"Nuestro PLOS UNO "El trabajo comenzó como un experimento mental bastante filosófico", dijo a TechXplore Andre Rosendo, el profesor que llevó a cabo el estudio. meta final. Basándonos en esta idea, comenzamos a idear escenarios experimentales en los que nuestro robot no solo pudiera actuar para sobrevivir, sino también para prosperar".
En su primer estudio centrado en este tema, Andre Rosendo, Xianglong Tan y Weijie Lyu intentaron idear un sistema que pudiera funcionar solo pintando circuitos eléctricos. En su nuevo trabajo, combinaron este sistema de impresión de circuitos con una pinza robótica, creando un robot que puede realizar un repertorio de acciones destinadas a obtener mayor potencia (es decir, voltajes más altos) de su entorno y así sobrevivir en entornos desfavorables.
El equipo probó su robot en simulaciones de diferentes escenarios del mundo real, incluidas tareas en las que tuvo que evitar obstáculos físicos o regiones que interrumpirían sus circuitos dibujados. Luego, también probaron el robot en un entorno del mundo real, para evaluar más a fondo sus capacidades.
"Nuestro robot comienza cada experimento con una batería, y su fuente de energía disminuye a medida que se mueve (y también la 'filtramos' para emular las pérdidas de energía natural debido a la homeostasis)", explicó el estudiante Xianglong Tan. "El robot pasa por una serie de episodios de entrenamiento virtual, con un terminal rojo (VCC) que debe conectarse a otro terminal rojo cerca de su cuerpo, y un terminal negro (Tierra) que debe coincidir con el negro para que el actual puede fluir hacia su batería".
Para evitar que su robot simplemente se mueva en línea recta, Rosendo y sus colegas agregaron obstáculos en su entorno, tanto en pruebas simuladas como en el mundo real. Los robots podían quitar fácilmente algunos de estos obstáculos, como los cubos de espuma, mientras que otros estaban conectados a una placa de conexión a tierra que "absorbía" la energía eléctrica cuando un circuito la tocaba.
El equipo descubrió que su robot aprendió rápida y efectivamente a superar estos obstáculos para sobrevivir y maximizar la energía recibida. Esto significaba reorganizar obstáculos o unir áreas en su entorno que no podía atraer.
"Creo que estamos dando pasos hacia comportamientos adaptativos para robots", dijo Rosendo. "Los humanos son capaces de adaptarse, ajustando su comportamiento para que coincida con el requerido en nuevas situaciones, y mejorando gradualmente a medida que maduran sus conocimientos. Podríamos estar hablando de deportes, tareas o incluso misiones espaciales:antes de estar en la cima de nuestro juego gastamos nuestro Esfuerzos iniciales para comprender las nuevas reglas para, más tarde, mejorar e ir más allá. Los robots hoy en día luchan por superar los fallos de funcionamiento y aprender a adaptarse para mantenerse funcionales es una habilidad que deberían imitar de nosotros".
El robot adaptable creado por Rosendo y sus colegas podría tener numerosas ventajas, ya que puede maximizar de forma autónoma la energía en su entorno y mantenerse funcional continuamente mediante la creación de nuevos circuitos eléctricos. En el futuro, este trabajo reciente podría inspirar el desarrollo de otros sistemas robóticos que puedan sobrevivir y prosperar en entornos complejos sin necesidad de nuevos circuitos o supervisión humana.
"Ahora estamos pensando en los próximos pasos para desarrollar nuestro trabajo y mantener este experimento interesante, como complicar la tarea e idear un sistema de 'cambio de batería' para hacer que el experimento sea más realista", agregó Tan.
© 2022 Red Ciencia X El chip neuromórfico reduce drásticamente los requisitos de energía para el robot rodante