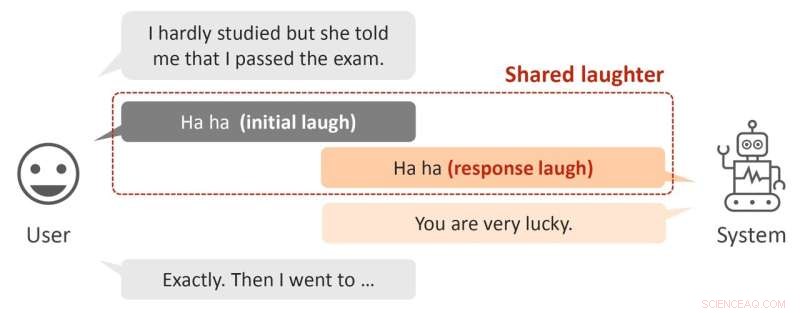
Un ejemplo de conversación entre los investigadores y Erica. Crédito:Inoue et al
Al menos desde la época de las mentes inquisitivas como Platón, los filósofos y los científicos se han preguntado "¿Qué es tan gracioso?" Los griegos atribuían la fuente del humor a sentirse superiores a expensas de los demás. El psicoanalista alemán Sigmund Freud creía que el humor era una forma de liberar la energía reprimida. El comediante estadounidense Robin Williams aprovechó su ira ante lo absurdo para hacer reír a la gente.
Parece que nadie puede estar realmente de acuerdo con la pregunta "¿Qué es tan divertido?" Así que imagina tratar de enseñarle a un robot a reír. Pero eso es exactamente lo que un equipo de investigadores de la Universidad de Kyoto en Japón está tratando de hacer al diseñar una IA que toma sus señales a través de un sistema de risa compartido. Los científicos describen su enfoque innovador para construir un hueso divertido para el androide japonés "Erica" en el último número de la revista Frontiers in Robotics and AI .
No es que los robots no puedan detectar la risa o incluso emitir una risa ahogada ante un chiste de papá malo. Más bien, el desafío es crear los matices humanos del humor para que un sistema de IA mejore las conversaciones naturales entre robots y personas.
"Creemos que una de las funciones importantes de la IA conversacional es la empatía", explicó el autor principal, el Dr. Koji Inoue, profesor asistente en la Universidad de Kyoto en el Departamento de Ciencia y Tecnología de Inteligencia dentro de la Escuela de Graduados en Informática. "La conversación es, por supuesto, multimodal, no solo responder correctamente. Así que decidimos que una forma en que un robot puede empatizar con los usuarios es compartir su risa, lo que no se puede hacer con un chatbot basado en texto".
Pasó algo gracioso
En el modelo de risa compartida, un humano inicialmente se ríe y el sistema de IA responde con una risa como una respuesta empática. Este enfoque requería diseñar tres subsistemas:uno para detectar la risa, un segundo para decidir si reír y un tercero para elegir el tipo de risa apropiado.
Los científicos recopilaron datos de entrenamiento anotando más de 80 diálogos de citas rápidas, un escenario social donde grandes grupos de personas se mezclan o interactúan uno a uno durante un breve período de tiempo. En este caso, el maratón de emparejamiento involucró a estudiantes de la Universidad de Kyoto y Erica, teleoperados por varias actrices amateur.
"Nuestro mayor desafío en este trabajo fue identificar los casos reales de risas compartidas, lo cual no es fácil porque, como saben, la mayoría de las risas en realidad no se comparten en absoluto", dijo Inoue. "Tuvimos que categorizar cuidadosamente exactamente qué risas podíamos usar para nuestro análisis y no simplemente asumir que se puede responder a cualquier risa".
El tipo de risa también es importante, porque en algunos casos una risita cortés puede ser más apropiada que un fuerte resoplido de risa. El experimento se limitó a risas sociales versus risas alegres.
El robot lo entiende
El equipo finalmente probó el nuevo sentido del humor de Erica al crear cuatro diálogos cortos de dos a tres minutos entre una persona y Erica con su nuevo sistema de risa compartida. En el primer escenario, solo profirió risas sociales, seguidas solo de risas alegres en el segundo y tercer intercambio, con ambos tipos de risas combinados en el último diálogo. El equipo también creó otros dos conjuntos de diálogos similares como modelos de referencia. En el primero, Erica nunca se ríe. En el segundo, Erica emite una risa social cada vez que detecta una risa humana sin usar los otros dos subsistemas para filtrar el contexto y la respuesta.
Los investigadores reunieron a más de 130 personas en total para escuchar cada escenario dentro de las tres condiciones diferentes (sistema de risa compartida, sin risa, todo risa) y evaluaron las interacciones en función de la empatía, la naturalidad, la semejanza humana y la comprensión. El sistema de risas compartidas funcionó mejor que cualquiera de los valores iniciales.
"El resultado más significativo de este artículo es que hemos demostrado cómo podemos combinar las tres tareas en un solo robot. Creemos que este tipo de sistema combinado es necesario para un comportamiento de risa adecuado, no solo para detectar una risa y responder a ella". eso", dijo Inoue.
Como viejos amigos
Todavía hay muchos otros estilos de risa para modelar y entrenar a Erica antes de que esté lista para entrar en el circuito de stand-up. "Hay muchas otras funciones y tipos de risa que deben tenerse en cuenta, y esta no es una tarea fácil. Ni siquiera hemos intentado modelar las risas no compartidas, aunque son las más comunes", señaló Inoue.
Por supuesto, la risa es solo un aspecto de tener una conversación natural como la de un humano con un robot.
"Los robots en realidad deberían tener un carácter distinto, y creemos que pueden mostrarlo a través de sus comportamientos conversacionales, como la risa, la mirada, los gestos y el estilo de hablar", agregó Inoue. "No creemos que este sea un problema fácil en absoluto, y pueden pasar más de 10 a 20 años antes de que finalmente podamos tener una conversación informal con un robot como lo haríamos con un amigo". ¿Podemos distinguir el grupo cultural de alguien por la forma en que se ríe?