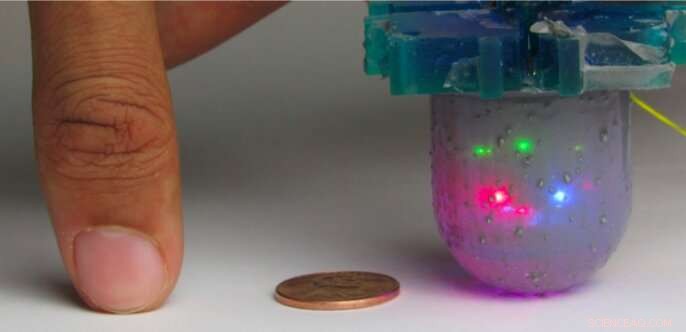
Un pulgar humano junto a OmniTact y un centavo estadounidense; mostrando el tamaño del sensor. Crédito:Padmanabha et al.
En años recientes, Los investigadores de todo el mundo han estado tratando de desarrollar sensores que pudieran replicar el sentido del tacto de los humanos en robots y mejorar sus habilidades de manipulación. Si bien algunos de estos sensores lograron resultados notables, la mayoría de las soluciones existentes tienen pequeños campos sensibles o solo pueden recopilar imágenes con baja resolución.
Un equipo de investigadores de UC Berkeley desarrolló recientemente un nuevo sensor táctil multidireccional, llamado OmniTact, que supera algunas de las limitaciones de los sensores desarrollados anteriormente. OmniTact, presentado en un artículo prepublicado en arXiv y que se presentará en ICRA 2020, actúa como un dedo artificial que permite a los robots detectar las propiedades de los objetos que sostiene o manipula.
"Nuestro laboratorio reconoció la necesidad de un sensor para tareas generales de manipulación robótica con capacidades ampliadas que los sensores táctiles actuales, "Frederik Ebert, uno de los investigadores que realizó el estudio, dijo a TechXplore. '"Los sensores táctiles existentes son planos, tienen pequeños campos sensibles o solo proporcionan señales de baja resolución. Por ejemplo, el sensor GelSight proporciona alta resolución (es decir, 400x400 píxeles) pero es grande y plana, proporcionando sensibilidad en un solo lado, mientras el sensor OptoForce está curvado, pero solo proporciona lecturas de fuerza en un solo punto ".
OmniTact, el sensor desarrollado por Ebert y sus colegas, es una adaptación de GelSight, un sensor táctil creado por investigadores del MIT y UC Berkeley. GelSight puede generar mapas tridimensionales detallados de la superficie de un objeto y detectar algunas de sus características.
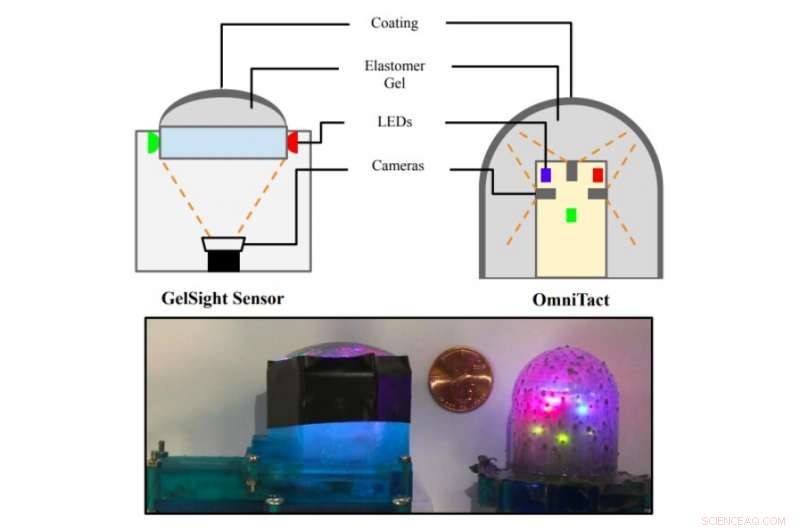
Una ilustración e imagen que explican las diferencias básicas entre el sensor GelSight y OmniTact. Crédito:Padmanabha et al.
En contraste con GelSight, OmniTact es multidireccional, lo que significa que todos sus lados tienen capacidades de detección. Además, puede proporcionar lecturas de alta resolución, es muy compacto y tiene una forma curva. Cuando se integra en una pinza o mano robótica, el sensor actúa como un dedo artificial sensible, "permitiendo al robot manipular y detectar una amplia gama de objetos que varían en forma y tamaño.
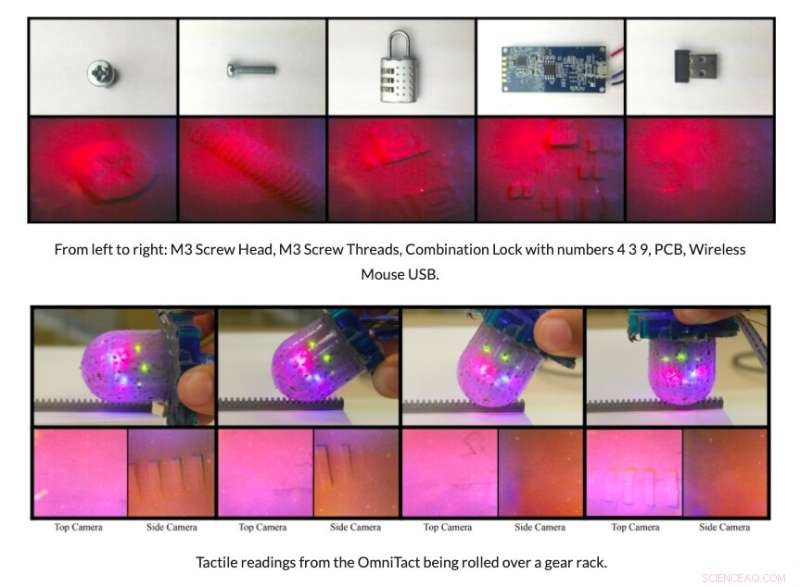
OmniTact se construyó incorporando múltiples microcámaras en una piel artificial hecha de gel de silicona. Las cámaras detectan deformaciones multidireccionales de la piel a base de gel, producir una señal rica que luego puede analizarse mediante visión por computadora y técnicas de procesamiento de imágenes para inferir información sobre los objetos que un robot está manipulando.
"Nuestro equipo utiliza enfoques basados en el aprendizaje para hacer uso de los comentarios de alta resolución y evitar los procedimientos de calibración manual, "Akhil Padmanabha, otro investigador involucrado en el estudio, dijo a TechXplore. "OmniTact proporciona detección táctil en todos los lados del sensor, permitiendo así que los robots tengan acceso a la retroalimentación táctil mientras hacen contacto con objetos en cualquier dirección ".
Ebert, Padmanabha y sus colegas evaluaron el rendimiento de su sensor en una tarea bastante desafiante, donde un robot tuvo que insertar un conector eléctrico en una toma de corriente. También probaron su capacidad para inferir el ángulo de contacto de un dedo cuando presiona contra un objeto determinado. En estas evaluaciones iniciales, OmniTact logró resultados notables, superando tanto a un sensor táctil que solo es sensible en un lado como a otro sensor multidireccional en la tarea de estimación de estado.
Crédito:Padmanabha et al.
"A través de nuestros experimentos con OmniTact, descubrimos que multidireccional, La detección táctil de alta resolución permite ciertas tareas de manipulación de grano fino, como la tarea de inserción del conector que presentamos, "Stephen Tian, otro investigador involucrado en el estudio, dijo a TechXplore. "Sospechamos que en el futuro la detección táctil multidireccional podría ser un elemento esencial en la manipulación robótica de propósito general, además de aplicaciones como la teleoperación robótica en cirugía, así como en misiones marítimas y espaciales ".
Los investigadores construyeron su sensor usando microcámaras que se usan típicamente en endoscopios, vertiendo el gel de silicona directamente sobre las cámaras. Como resultado, OmniTact es mucho más compacto que los sensores GelSight desarrollados anteriormente y, por lo tanto, podría tener una gama más amplia de posibles aplicaciones. En el futuro, podría allanar el camino para la creación de nuevos robots con capacidades de detección más sofisticadas.
"Planeamos hacer que OmniTact sea más económico y compacto, permitiendo que se utilice en una gama más amplia de tareas. Nuestro equipo también planea realizar más investigaciones sobre manipulación robótica que informarán a las generaciones futuras de sensores táctiles, "Dijo Padmanabha.
© 2020 Science X Network