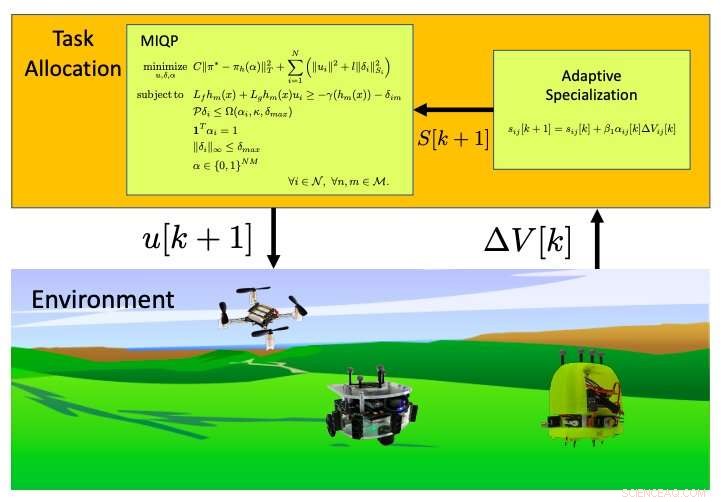
Una figura que ilustra el circuito de retroalimentación propuesto entre el marco de asignación de tareas, el entorno, y la actualización de especialización adaptativa. La eficacia de los robots en cada tarea se mide como ∆V [k], que se pasa a la ley de actualización de especialización adaptativa. Una vez que se calculan los nuevos parámetros de especialización, Se resuelve la asignación de tareas MIQP y se envían las entradas a los robots. Crédito:Emam et al.
En años recientes, los robots se han vuelto cada vez más sofisticados, por lo tanto, ahora pueden completar una amplia variedad de tareas. Si bien algunos robots están diseñados para funcionar de forma individual, por ejemplo, proporcionar asistencia básica en los hogares de las personas, otros pueden ser más eficientes cuando se implementan en equipos.
Durante las misiones de búsqueda y rescate, por ejemplo, después de desastres naturales, los robots pueden ser más efectivos como equipo, ya que podían entregar suministros o buscar supervivientes más rápido, cubriendo regiones geográficas más extensas. Para completar misiones en equipo de la manera más eficiente, sin embargo, los robots deberían poder cooperar bien y distribuir eficazmente diferentes tareas entre sí.
Teniendo esto en cuenta, Los investigadores del Instituto de Tecnología de Georgia (Georgia Tech) desarrollaron recientemente un marco para la asignación de tareas adaptativas durante las misiones que deben ser completadas por un equipo de robots. Su marco, presentado en un artículo publicado previamente en arXiv, puede asignar tareas a los robots en función de sus capacidades y características únicas.
"Se prevé que los equipos de robots operen en entornos dinámicos y este documento propone una regla actualizada que permite a los robots saber qué tan aptos están para cada una de las diversas tareas que se les asignan sobre la marcha". "Yousef A Emam, uno de los investigadores que realizó el estudio, dijo a TechXplore.
El marco desarrollado por los investigadores se basa en una técnica de asignación de tareas para sistemas heterogéneos de múltiples robots que introdujeron en un artículo anterior. Esta estrategia ideada previamente implica el uso de un algoritmo que tiene en cuenta las diferencias en las capacidades de los robots individuales y asigna las tareas en consecuencia. La asignación y ejecución de estas tareas se realizan simultáneamente.
"Nuestro marco resuelve problemas de optimización en línea, decirle a los robots individuales cómo priorizar sus contribuciones a las diversas tareas que deben completar (es decir, asignación de tareas), y cómo hacerlo (es decir, ejecución de tareas), "Dijo Emam.
En su estudio, Emam y sus colegas se basaron en la estrategia de asignación de tareas que desarrollaron previamente, haciéndolo más sensible a los cambios en el entorno circundante de los robots. A diferencia de su versión anterior, su nuevo marco no requiere un modelo explícito del entorno o de las capacidades del robot que se desconocen. En lugar de, Considera principalmente el progreso colectivo que hizo el equipo de robots en una misión determinada y el desempeño de cada robot en tareas individuales.
"En nuestro estudio reciente, Desarrollamos una ley de retroalimentación que hace que el marco desarrollado previamente sea adaptable a las perturbaciones ambientales, "Explicó Emam." Esto significa que incluso si el robot no tiene un conocimiento perfecto de cuán adecuado es para cada una de las tareas, lo aprenderá sobre la marcha ".
Los investigadores evaluaron su marco en una serie de simulaciones y encontraron que logró resultados muy prometedores. En estos experimentos, su enfoque permitió la asignación efectiva de tareas entre robots en una variedad de condiciones ambientales, incluso en los casos en los que se desconocían las capacidades de los robots individuales antes de su despliegue.
En el futuro, el marco de asignación y ejecución de tareas desarrollado por Emam y sus colegas podría mejorar la cooperación entre los robots que se implementan como un equipo, mejorando su desempeño colectivo. En última instancia, esto podría facilitar la movilización a gran escala de robots durante las misiones de búsqueda y rescate.
"Actualmente estamos trabajando para ampliar el marco para incluir las funciones de cada robot (por ejemplo, sensores, actuadores), para que podamos modelar fallas de funciones en línea de manera más explícita, "Dijo Emam." Además, otro aspecto que estamos investigando es la distribución de la computación entre los robots (descentralizados) ".
© 2020 Science X Network