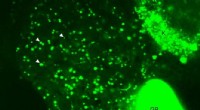
Figura que muestra la estrategia para la detección táctil basada en la visión introducida por los investigadores. Crédito:Sferrazza, et al., ieeexplore.ieee.org/document/8918082
Para interactuar de manera efectiva con su entorno circundante, los robots deberían poder identificar las características de diferentes objetos con solo tocarlos, como hacen los humanos. Esto les permitiría hacerse con y gestionar objetos de forma más eficiente, utilizando la retroalimentación recopilada por los sensores para ajustar sus estrategias de agarre y manipulación.
Teniendo esto en cuenta, Grupos de investigación de todo el mundo han estado tratando de desarrollar técnicas que puedan dar a los robots un sentido del tacto mediante el análisis de los datos recopilados por los sensores. muchos de los cuales se basan en el uso de arquitecturas de aprendizaje profundo. Si bien algunos de estos métodos son prometedores, Por lo general, requieren una gran cantidad de datos de entrenamiento y no siempre se generalizan bien en objetos nunca antes vistos.
Los investigadores de ETH Zurich han introducido recientemente una nueva estrategia basada en el aprendizaje profundo que podría permitir la detección táctil en robots sin requerir grandes cantidades de datos del mundo real. Su enfoque descrito en un artículo publicado previamente en arXiv, implica entrenar redes neuronales profundas completamente en datos de simulación.
"Nuestra técnica aprende de los datos cómo predecir la distribución de las fuerzas ejercidas por un objeto en contacto con la superficie de detección, "Carlo Sferrazza, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Hasta aquí, estos datos (del orden de decenas de miles de puntos de datos) debían recopilarse en una configuración experimental durante varias horas, lo cual era caro en términos de tiempo y equipo. En este trabajo, generamos nuestros datos completamente en simulación, conservando una alta precisión de detección al implementar nuestra técnica en el mundo real ".
En sus experimentos, Sferrazza y sus colegas utilizaron un sensor que construyeron con componentes simples y de bajo costo. Este sensor está compuesto por una cámara estándar colocada debajo de un material blando, que contiene una dispersión aleatoria de diminutas partículas de plástico.
Cuando se aplica una fuerza a su superficie, el material blando se deforma y hace que las partículas de plástico se muevan. Este movimiento luego es capturado por la cámara del sensor y grabado.
"Aprovechamos los patrones de imagen creados por las partículas en movimiento para extraer información sobre las fuerzas que causan la deformación del material, "Sferrazza explicó." Al incrustar densamente las partículas en el material podemos obtener una resolución extremadamente alta. Dado que adoptamos un enfoque basado en datos para resolver esta tarea, podemos superar la complejidad de modelar el contacto con materiales blandos y estimar la distribución de estas fuerzas con gran precisión ".
Esencialmente, los investigadores crearon modelos del material blando del sensor y la proyección de la cámara utilizando métodos computacionales de última generación. Luego utilizaron estos modelos en simulaciones, para crear un conjunto de datos de 13, 448 imágenes sintéticas que son ideales para entrenar algoritmos de detección táctil. El hecho de que hayan podido generar datos de entrenamiento para su modelo de detección táctil en simulaciones es muy ventajoso, ya que les impedía tener que recopilar y anotar datos en el mundo real.
"También desarrollamos una técnica de aprendizaje por transferencia que nos permite usar el mismo modelo en múltiples instancias de los sensores táctiles que producimos en el mundo real, sin necesidad de datos adicionales, ", Dijo Sferrazza." Esto significa que cada sensor se vuelve más barato de producir, ya que no requieren esfuerzos de calibración adicionales ".
Los investigadores utilizaron el conjunto de datos sintéticos que crearon para entrenar una arquitectura de red neuronal para aplicaciones de detección táctil basadas en la visión y luego evaluaron su rendimiento en una serie de pruebas. La red neuronal logró resultados notables, realizar predicciones de detección precisas sobre datos reales, incluso si fue entrenado en simulaciones.
"La arquitectura de red neuronal a medida que entrenamos también muestra posibilidades de generalización muy prometedoras para su uso en otras situaciones, cuando se aplica a datos que son bastante diferentes de los utilizados en nuestras simulaciones, p.ej., para la estimación del contacto con objetos únicos o múltiples de formas arbitrarias, "Dijo Sferrazza.
En el futuro, la arquitectura de aprendizaje profundo desarrollada por Sferrazza y sus colegas podría proporcionar a los robots un sentido artificial del tacto, potencialmente mejorando sus habilidades de agarre y manipulación. Además, el conjunto de datos sintéticos que compilaron podría usarse para entrenar otros modelos para la detección táctil o puede inspirar la creación de nuevos conjuntos de datos basados en simulación.
"Ahora queremos evaluar nuestros algoritmos en tareas que implican interacciones muy generales con objetos complejos, y también estamos trabajando para mejorar su precisión, ", Dijo Sferrazza." Creemos que esta técnica mostrará sus ventajas cuando se aplique a tareas robóticas del mundo real, como aplicaciones que implican la manipulación fina de objetos frágiles, como un vaso o un huevo ".
© 2020 Science X Network