Salida de la red neuronal para controlar los motores del robot. Crédito:Blanchard, Aihara y Levi.
En años recientes, un número creciente de estudios se ha dirigido al desarrollo de robots inspirados en la naturaleza, particularmente por ciertas especies de animales. En un estudio publicado en el Journal of Robotics de Atlantis Press, Redes y vida artificial, un equipo de investigadores de la Universidad de Burdeos y la Universidad de Tokio ha creado un robot que se parece a una serpiente tanto en su forma como en sus movimientos.
"El principal objetivo de esta investigación fue desarrollar un robot para aplicaciones biomédicas, especialmente lesiones de la médula espinal, "Timothée Levi, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Nos gustaría diseñar nuevas neuroprótesis donde las neuronas artificiales puedan reemplazar a las biológicas. En nuestro robot, utilizamos una locomoción biomimética utilizando redes neuronales de picos biomiméticos, que reproduce el mismo comportamiento que tienen las serpientes en la naturaleza ".
Uno de los desafíos clave al desarrollar robots bioinspirados es reproducir de manera efectiva la locomoción del animal de interés. En los animales la mayoría de los movimientos son generados por la actividad de las redes de generación de patrones centrales (CPG).
Esencialmente, Las CPG son circuitos neuronales que, cuando se activa, puede producir patrones motores rítmicos (por ejemplo, caminar, respiración, nadando, etc.) en ausencia de entradas sensoriales y relacionadas con el tiempo. En el pasado, Las GPC y sus efectos sobre la locomoción animal han sido el foco de un gran número de estudios.
Generalmente, Los investigadores que están tratando de desarrollar robots similares a animales replican CPG utilizando modelos de neuronas simples u osciladores. que no son escalas de tiempo biológicas, y por lo tanto se consideran sistemas bioinspirados en lugar de bio-miméticos. Estos modelos, sin embargo, simplemente proporcionan oscilaciones sinusoidales, y por lo tanto son incapaces de reproducir fielmente una variedad de patrones de locomoción animal.
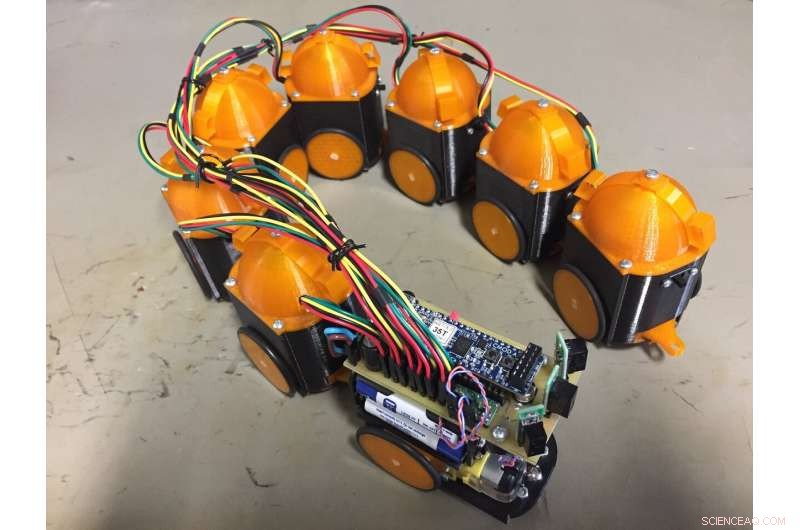
El robot serpiente desarrollado por los investigadores. Crédito:Blanchard, Aihara y Levi.
En su estudio, Levi y sus colegas se propusieron desarrollar GPC biomiméticos que puedan replicar eficazmente el comportamiento biológico, utilizando un sistema neuromórfico digital en tiempo real. El robot serpiente que desarrollaron tiene dos componentes clave, uno actúa como su cerebro y el otro como su cuerpo.
"Nuestro robot serpiente se puede dividir en 2 partes, "Levi explicó." El primero es su cerebro, utilizando redes neuronales biomiméticas. Esta red neuronal está muy cerca de la biología con el modelo biofísico de neuronas, sinapsis y plasticidad. La segunda parte es el cuerpo, que tiene diferentes "vagones" que modelan las diferentes partes de la médula espinal y segmentos de serpientes. La señal es creada por el cerebro de la serpiente y se propaga por todo el cuerpo controlando los diferentes motores ".
El robot serpiente creado por Levi y sus colegas está controlado en tiempo real por una red de CPG biomiméticos. Los investigadores demostraron que su sistema puede conectarse a neuronas biológicas y también podría usarse para simular diferentes hipótesis o tratamientos de protocolo para aplicaciones biomédicas. como lesiones de la médula espinal y neuroprótesis.
"En mi opinión, el aspecto más significativo de nuestro estudio es que intentamos ser fieles a la biología y logramos integrar la red neuronal en una pequeña cuenta electrónica, "Dijo Levi." Curiosamente, el robot que creamos funciona en tiempo real y tiene las mismas especificaciones que en la naturaleza (período de locomoción, variabilidad, ruido, etc.) ".
En el futuro, el robot serpiente desarrollado por Levi y sus colegas podría tener una variedad de aplicaciones interesantes en robótica y otros campos. Por ejemplo, podría usarse para comprender mejor el comportamiento de los reptiles o podría tener múltiples aplicaciones de robótica biohíbrida.
"Ahora estamos planeando agregar más inteligencia en el cerebro del robot con reglas de aprendizaje, además de utilizar los diferentes sensores, "Dijo Levi." Además, Uno de nuestros objetivos a más largo plazo es combinar neuronas artificiales y neuronas vivas para crear un robot biohíbrido ".
© 2019 Science X Network