Peatones, el robot bípedo desarrollado por los investigadores, cruzando la calle al lado de un usuario humano. Crédito:Ahmad et al.
Los seres humanos generalmente pueden adaptar su estilo de caminar en función del entorno en el que se mueven, por ejemplo, acelerando si la consistencia del suelo bajo sus pies lo permite, desacelerar cuando el piso está resbaladizo, cambiar de dirección para evitar charcos o agujeros en el suelo, etcétera. Para navegar por una variedad de entornos, los robots deberían poder adaptar su comportamiento al caminar de una manera similar, ajustar su estructura en respuesta a los cambios ambientales.
Teniendo esto en cuenta, Investigadores de la Universidad de Osaka en Japón han creado recientemente PedestriANS, un robot bípedo que puede cambiar algunas de las características físicas y los movimientos de sus piernas en respuesta a cambios en su entorno circundante. Este nuevo robot, presentado en un artículo publicado en la revista SAGE Comportamiento adaptativo , puede cambiar su estilo de caminar utilizando un sistema simple que conecta los movimientos y la configuración de sus dos piernas.
“El principal objetivo de nuestro trabajo es desarrollar robots robustos que puedan manejar perturbaciones; robots que puedan acompañar a los humanos y caminar de manera efectiva sobre terrenos uniformes y desiguales como pasto y grava, "Huthaifa Ahmad, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Para alcanzar este objetivo, necesitamos desarrollar sistemas robóticos con una morfología adaptativa; porque incluso con los robots bípedos más avanzados que están disponibles en estos días, tener un modelo preciso tanto del cuerpo del robot como del entorno es crucial para que funcionen correctamente ".
Peatones, el robot desarrollado por Ahmad y sus colegas, se basa en un sistema de red de actuadores (ANS), un concepto de diseño introducido en su trabajo anterior. En sus estudios anteriores, los investigadores incorporaron el mismo concepto en varias otras aplicaciones, incluyendo espinas robóticas, brazos y robots de múltiples patas.
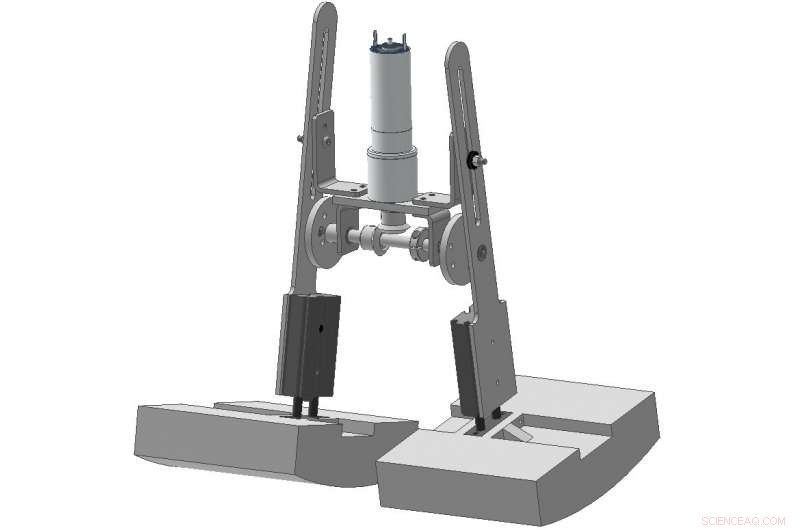
Una ilustración de Peatones. Crédito:Ahmad et al.
"Como se demostró su viabilidad en varios estudios, Actualmente estoy utilizando el principio ANS en mi investigación para lograr robots adaptables, utilizando las diferentes interacciones entre los actuadores montados en sus cuerpos, "Dijo Ahmad.
Los movimientos del robot desarrollado por Ahmad y sus colegas son producidos por un solo motor, y sus patas están unidas entre sí a través de un ANS. A diferencia de otros robots bípedos basados en sistemas complejos, Peatones tiene una estructura bastante simple. El robot se adapta a los cambios en el entorno que lo rodea explotando las características físicas de sus piernas y las interacciones entre sus diferentes componentes. resultando en una variedad de diferentes comportamientos al caminar.
"El comportamiento de caminar del robot cambia al cambiar la interacción entre los actuadores del ANS, "Ahmad dijo." Para producir un mejor comportamiento, Las demandas del robot para un determinado patrón de conexión difieren según la situación dada. Nuestro trabajo sugiere que la mejor manera de realizar robots autoadaptables es permitiéndoles ajustar sus morfologías y explotar la dinámica de todo su cuerpo en respuesta a los cambios ambientales ".

Peatones, el robot bípedo desarrollado por los investigadores. Crédito:Ahmad et al.
Los investigadores evaluaron el rendimiento de su robot en una serie de experimentos. Primeramente, probaron cómo los cambios en la morfología del robot afectaron su comportamiento al caminar al observar su capacidad para adaptarse a diferentes materiales del suelo, centrándose en los cambios en su estilo de caminar, estabilidad, velocidad, y la dirección en la que se movió.
Después de analizar los resultados recopilados en este primer experimento, Ahmad y sus colegas mejoraron el diseño del robot de una manera que le permitió cambiar automáticamente a través de diferentes patrones de conexión entre sus patas. Luego realizaron una segunda evaluación y encontraron mejoras significativas en cómo el robot ajustaba su morfología durante la locomoción. En este segundo experimento, Los peatones produjeron de manera eficaz estilos de caminar adaptables en respuesta al entorno en el que operaba.
En el futuro, El robot desarrollado por este equipo de investigadores podría usarse para completar tareas que implican moverse en entornos incontrolados y en constante cambio. Si bien los Peatones pueden cambiar el tipo de interacción entre sus piernas para producir diferentes comportamientos de locomoción que mejor se adapten a su entorno, todavía no puede identificar de forma autónoma los ajustes morfológicos que mejor se adaptan a situaciones específicas. Los investigadores planean continuar trabajando en el robot para habilitar esta importante capacidad, lo cual es necesario para que el robot funcione sin la intervención y la guía humanas continuas.
"El siguiente paso en nuestra investigación será realizar un sistema de control que pueda permitir que el robot siga proporcionando el mejor rendimiento durante todas las fases de locomoción, seleccionar de forma autónoma un patrón de conexión adecuado, "Ahmad dijo." Además, extendiendo el ANS para incluir más partes del robot (por ejemplo, parte superior del cuerpo), esto aumentará los posibles cambios morfológicos, lo que a su vez se refleja en la adaptabilidad del robot ".
© 2020 Science X Network