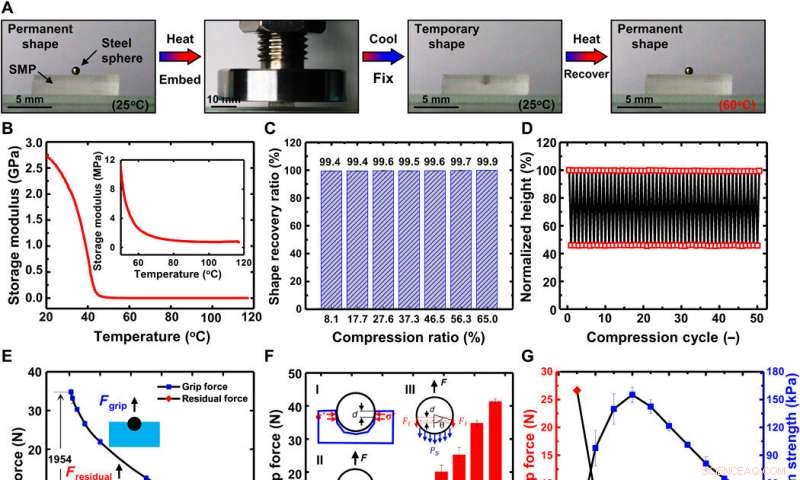
Caracterización del material epoxi SMP y la pinza SMP. (A) Demostración de la fijación de forma temporal y el efecto de memoria de forma permanente del SMP. (B) Módulo de almacenamiento frente a temperatura del material SMP. Recuadros:aumento del módulo de almacenamiento frente a la temperatura a temperaturas más altas. (C) Relación de recuperación de forma del SMP bajo diferentes relaciones de compresión. (D) Rendimiento del SMP bajo compresión repetida. (E) Comparación de las fuerzas de agarre y residuales en función de las velocidades de agarre. Parámetros para la medición de la fuerza de agarre:temperatura para empotrar, 120 ° C; temperatura para tirar, 30 ° C; profundidad de incrustación, 3 mm; diámetro del penetrador, 5 mm. (F) Influencia del ángulo de empotramiento en la fuerza de agarre (temperatura para empotrar, 120 ° C; temperatura para tirar, 30 ° C; diámetro del penetrador, 5 mm; velocidad de agarre, 100 μm / s). Los recuadros muestran el mecanismo subyacente del agarre. (I y II) Ilustraciones de perfil que muestran la evolución de la configuración de la pinza SMP y el sistema de esfera empotrada durante el proceso de sujeción. (III) Diagrama de fuerzas de la esfera empotrada en dirección vertical. (G) Influencia de la temperatura sobre la fuerza de agarre. La línea con rombos rojos da la fuerza de agarre, mientras que la línea marcada con cuadrados azules muestra la adherencia. La fuerza de agarre se obtiene de las pruebas de empotramiento y extracción (temperatura para empotrar, 120 ° C; temperatura para tirar, 30 ° C; diámetro del penetrador, 5 mm; profundidad de incrustación, 3 mm; velocidad de agarre, 1000 μm / s), mientras que la fuerza de adhesión a la misma velocidad de separación (1000 μm / s) se obtiene mediante pruebas de tracción entre una placa de vidrio y el SMP. Crédito de la foto:Changhong Linghu, Universidad de Zhejiang. Crédito: Avances de la ciencia (2020). DOI:10.1126 / sciadv.aay5120
Un equipo de investigadores de la Universidad de Zhejiang ha creado una nueva pinza robótica utilizando un polímero con memoria de forma. En su artículo publicado en la revista Avances de la ciencia , el grupo describe el material, su uso como pinza, y lo bien que funcionó.
Durante las últimas décadas, Los científicos han utilizado una variedad de enfoques para darle a un robot la capacidad de levantar y manipular objetos y volver a colocarlos, todo sin dañar el objeto. Se ha avanzado mucho en las pinzas robóticas, debido principalmente a los avances en la tecnología de microchip, pero todavía hay mucho margen de mejora. Uno de los mayores desafíos es desarrollar una pinza que pueda recoger y manipular objetos de casi cualquier forma. diferentes tamaños, y fabricado con diferentes materiales. Crear una pinza con forma de mano humana que pueda levantar un alfiler de una mesa, llevar un huevo crudo a través de una habitación o atar una cinta de niño en el pelo, requiere una pinza muy sofisticada y un software asociado. En este nuevo esfuerzo, los investigadores han eliminado la necesidad de sofisticación adoptando un enfoque completamente diferente.
Investigaciones anteriores han demostrado que cuando se calientan ciertos polímeros, se expanden ligeramente y se ablandan. Los investigadores utilizaron ambas propiedades para crear su nueva pinza. Crearon una pinza de polímero que se ablanda cuando se calienta a 45 ° C y luego se endurece de nuevo cuando se expone a 25 ° C. Su forma base es cuboide (un rectángulo tridimensional). Luego fijaron la pinza a un brazo simple que podía colocar la pinza contra una mesa o levantarla justo encima de la mesa, lo suficiente como para permitir la colocación de varios objetos debajo.
La prueba consistió en colocar un objeto como una pequeña bola de acero debajo de la pinza y luego calentar todo el aparato en un recinto a 45 ° C. Despues de unos minutos, el polímero se había ablandado. Luego, los investigadores bajaron la pinza al objeto, permitir que el objeto sea abarcado, similar a colocar una barra de mantequilla blanda en un tenedor. A continuación, se redujo la temperatura en el recinto a 25 ° C. En ese punto, el polímero se contrajo ligeramente, agarrando el objeto mientras se reafirmaba. Luego, los investigadores levantaron la pinza y el objeto que sostenía. Para volver a colocar el objeto, los investigadores bajaron la pinza a la mesa y elevaron la temperatura en el recinto a 45 ° C.
© 2020 Science X Network