Los investigadores del MIT han creado una piel "sensorizada", hecho con sensores inspirados en kirigami, que da a los robots blandos una mayor conciencia del movimiento y la posición de sus cuerpos. Crédito:Ryan L. Truby, MIT CSAIL
Por primera vez, Los investigadores del MIT han permitido que un brazo robótico blando comprenda su configuración en el espacio 3-D, aprovechando solo los datos de movimiento y posición de su propia piel "sensorizada".
Robots blandos construidos con materiales altamente compatibles, similares a los que se encuentran en los organismos vivos, están siendo promocionados como más seguros, y más adaptable, elástico, y alternativas bioinspiradas a los tradicionales robots rígidos. Pero dar control autónomo a estos robots deformables es una tarea monumental porque pueden moverse en un número virtualmente infinito de direcciones en cualquier momento dado. Eso dificulta la formación de modelos de planificación y control que impulsan la automatización.
Los métodos tradicionales para lograr el control autónomo utilizan grandes sistemas de múltiples cámaras de captura de movimiento que brindan a los robots información sobre los movimientos y posiciones en 3D. Pero esos no son prácticos para los robots blandos en aplicaciones del mundo real.
En un artículo que se publica en la revista Cartas de automatización y robótica de IEEE , los investigadores describen un sistema de sensores blandos que cubren el cuerpo de un robot para proporcionar "propiocepción", es decir, conciencia del movimiento y la posición de su cuerpo. Esa retroalimentación se encuentra con un novedoso modelo de aprendizaje profundo que filtra el ruido y captura señales claras para estimar la configuración tridimensional del robot. Los investigadores validaron su sistema en un brazo robótico blando que se asemeja a la trompa de un elefante. que puede predecir su propia posición a medida que gira y se extiende de forma autónoma.
Los sensores blandos de los investigadores son láminas de silicona conductora cortadas en patrones kirigami. Tienen propiedades "piezorresistivas", lo que significa que cambian en la resistencia eléctrica cuando se tensan. A medida que el sensor se deforma en respuesta al estiramiento y compresión del brazo robótico, su resistencia eléctrica se convierte en un voltaje de salida que luego se usa como una señal que se correlaciona con ese movimiento. Crédito:Ryan L. Truby, MIT CSAIL
Los sensores se pueden fabricar con materiales disponibles en el mercado, lo que significa que cualquier laboratorio puede desarrollar sus propios sistemas, dice Ryan Truby, un posdoctorado en el Laboratorio de Ciencias de la Computación y Artificial del MIT (CSAIL) que es coautor del artículo junto con el posdoctorado de CSAIL Cosimo Della Santina.
"Estamos sensorizando robots blandos para obtener retroalimentación para el control de los sensores, no sistemas de visión, usando un muy fácil, método rápido de fabricación, ", dice." Queremos utilizar estos blandos baúles robóticos, por ejemplo, para orientarse y controlarse automáticamente, para recoger cosas e interactuar con el mundo. Este es un primer paso hacia ese tipo de control automatizado más sofisticado ".
Un objetivo futuro es ayudar a fabricar miembros artificiales que puedan manejar y manipular con mayor destreza objetos en el medio ambiente. "Piense en su propio cuerpo:puede cerrar los ojos y reconstruir el mundo basándose en los comentarios de su piel, "dice la coautora Daniela Rus, director de CSAIL y el profesor Andrew y Erna Viterbi de Ingeniería Eléctrica e Informática. "Queremos diseñar esas mismas capacidades para robots blandos".
Dar forma a sensores blandos

Crédito:Instituto de Tecnología de Massachusetts
Un objetivo desde hace mucho tiempo en la robótica blanda han sido los sensores corporales totalmente integrados. Los sensores rígidos tradicionales restan valor a la conformidad natural de un cuerpo de robot blando, Complicar su diseño y fabricación, y puede causar varias fallas mecánicas. Los sensores basados en materiales blandos son una alternativa más adecuada, pero requieren materiales y métodos especializados para su diseño, lo que dificulta que muchos laboratorios de robótica fabriquen e integren en robots blandos.
Mientras trabajaba en su laboratorio de CSAIL un día buscando inspiración para materiales de sensores, Truby hizo una conexión interesante. "Encontré estas láminas de materiales conductores que se utilizan para blindaje contra interferencias electromagnéticas, que puedes comprar en cualquier lugar en rollos, ", dice. Estos materiales tienen propiedades" piezorresistivas ", lo que significa que cambian en la resistencia eléctrica cuando se tensan. Truby se dio cuenta de que podían ser sensores suaves eficaces si se colocaban en determinados puntos del maletero. A medida que el sensor se deforma en respuesta al estiramiento y compresión del tronco, su resistencia eléctrica se convierte en un voltaje de salida específico. Luego, el voltaje se usa como una señal que se correlaciona con ese movimiento.
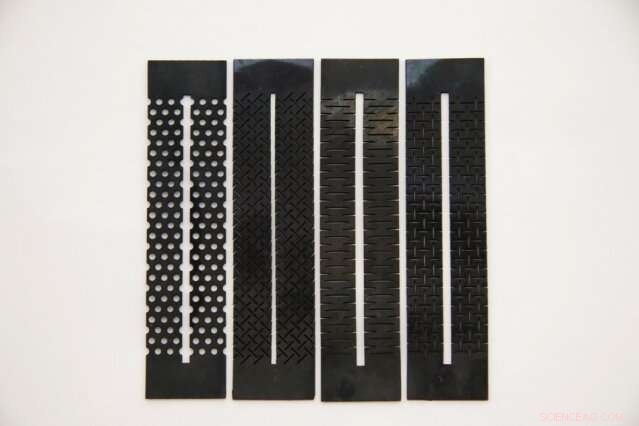
Pero el material no se estiró mucho, lo que limitaría su uso para la robótica blanda. Inspirado en kirigami, una variación del origami que incluye hacer cortes en un material, Truby diseñó y cortó con láser tiras rectangulares de láminas de silicona conductora en varios patrones. como hileras de pequeños agujeros o rebanadas entrecruzadas como una cerca de alambre. Eso los hizo mucho más flexibles estirable "y hermoso a la vista, "Dice Truby.
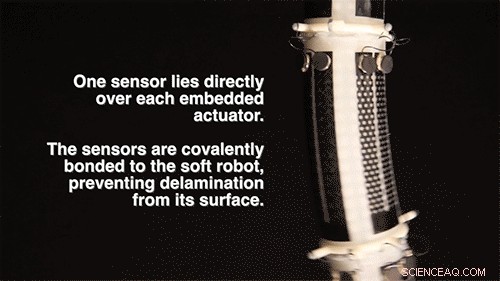
El tronco robótico de los investigadores consta de tres segmentos, cada uno con cuatro actuadores fluídicos (12 en total) que se utilizan para mover el brazo. Fusionaron un sensor sobre cada segmento, con cada sensor cubriendo y recopilando datos de un actuador integrado en el robot blando. Usaron "unión de plasma, "una técnica que energiza una superficie de un material para que se adhiera a otro material. Se necesitan aproximadamente un par de horas para dar forma a docenas de sensores que se pueden unir a los robots blandos utilizando un dispositivo de unión por plasma de mano.

Crédito:Instituto de Tecnología de Massachusetts
Como se hipotetizó, los sensores capturaron el movimiento general del maletero. Pero eran realmente ruidosos. "Esencialmente, son sensores no ideales en muchos sentidos, "Dice Truby." Pero eso es solo un hecho común de hacer sensores a partir de materiales conductores blandos. Los sensores de mayor rendimiento y confiabilidad requieren herramientas especializadas que la mayoría de los laboratorios de robótica no tienen ".
Para estimar la configuración del robot blando utilizando solo los sensores, los investigadores construyeron una red neuronal profunda para hacer la mayor parte del trabajo pesado, tamizando el ruido para capturar señales de retroalimentación significativas. Los investigadores desarrollaron un nuevo modelo para describir cinemáticamente la forma del robot blando que reduce enormemente la cantidad de variables necesarias para que su modelo se procese.
Crédito:Ryan L. Truby, MIT CSAIL
En experimentos, los investigadores hicieron que el tronco se balanceara y se extendiera en configuraciones aleatorias durante aproximadamente una hora y media. Utilizaron el sistema tradicional de captura de movimiento para los datos reales del terreno. Entrenando, el modelo analizó los datos de sus sensores para predecir una configuración, y comparó sus predicciones con los datos reales que se estaban recopilando simultáneamente. Al hacerlo, el modelo "aprende" a mapear patrones de señales de sus sensores a configuraciones del mundo real. Resultados indicados, que para configuraciones determinadas y más estables, la forma estimada del robot coincidía con la verdad del suelo.
Próximo, los investigadores tienen como objetivo explorar nuevos diseños de sensores para mejorar la sensibilidad y desarrollar nuevos modelos y métodos de aprendizaje profundo para reducir el entrenamiento requerido para cada nuevo robot blando. También esperan perfeccionar el sistema para capturar mejor los movimientos dinámicos completos del robot.
En la actualidad, la red neuronal y la piel del sensor no son sensibles para capturar movimientos sutiles o dinámicos. Pero, por ahora, Este es un primer paso importante para los enfoques basados en el aprendizaje para el control robótico suave, Truby dice:"Como nuestros robots blandos, Los sistemas vivos no tienen que ser totalmente precisos. Los humanos no son máquinas precisas, en comparación con nuestras contrapartes robóticas rígidas, y lo hacemos muy bien ".
Esta historia se vuelve a publicar por cortesía de MIT News (web.mit.edu/newsoffice/), un sitio popular que cubre noticias sobre la investigación del MIT, innovación y docencia.