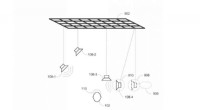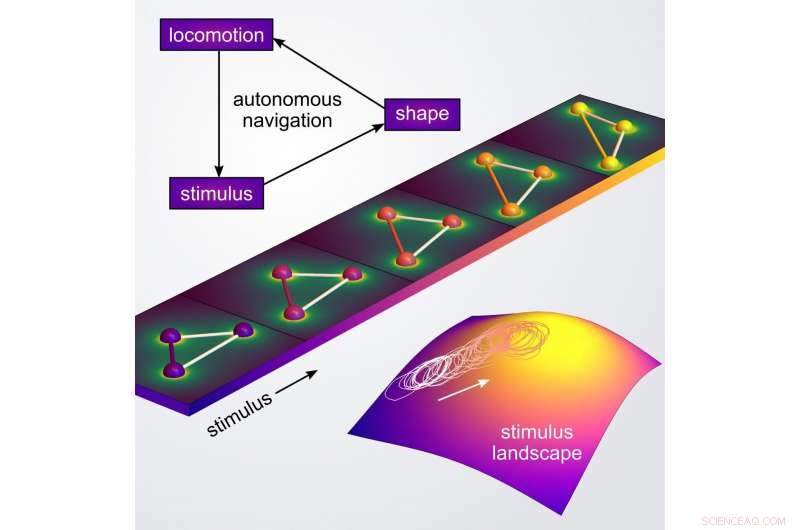
Un esquema del mecanismo de navegación autónomo a través del cambio de forma Crédito:Yong Dou / Columbia Engineering
La mayoría de los materiales sintéticos, incluidos los de los electrodos de la batería, membranas de polímero, y catalizadores, se degradan con el tiempo porque no tienen mecanismos internos de reparación. Si pudiera distribuir microrobots autónomos dentro de estos materiales, entonces podrías usar los microrobots para hacer reparaciones continuas desde el interior. Un nuevo estudio del laboratorio de Kyle Bishop, profesor asociado de ingeniería química, propone una estrategia para robots a microescala que pueden detectar síntomas de un defecto material y navegar de forma autónoma hasta el lugar del defecto, donde se podrían realizar acciones correctivas. El estudio fue publicado en Investigación de revisión física 2 de diciembre, 2019.
Las bacterias nadadoras buscan regiones de alta concentración de nutrientes mediante la integración de sensores químicos y motores moleculares. muy parecido a un automóvil autónomo que utiliza información de cámaras y otros sensores para seleccionar una acción adecuada para llegar a su destino. Los investigadores han tratado de imitar estos comportamientos mediante el uso de pequeñas partículas impulsadas por combustibles químicos u otras entradas de energía. Si bien las variaciones espaciales en el medio ambiente (por ejemplo, en la concentración de combustible) puede actuar para orientar físicamente la partícula y así dirigir su movimiento, este tipo de navegación tiene limitaciones.
"Las partículas autopropulsadas existentes se parecen más a un tren fuera de control que es dirigido mecánicamente por rieles sinuosos que a un automóvil autónomo guiado de forma autónoma por información sensorial, ", dice Bishop." Nos preguntamos si podríamos diseñar robots a microescala con sensores de material y actuadores que naveguen más como bacterias ".
El equipo de Bishop está desarrollando un nuevo enfoque para codificar la navegación autónoma de microrobots que se basa en materiales que cambian de forma. Características locales del medio ambiente, como la temperatura o el pH, determinar la forma tridimensional de la partícula, que a su vez influye en su movimiento autopropulsado. Controlando la forma de la partícula y su respuesta a los cambios ambientales, los investigadores modelan cómo los microrobots pueden diseñarse para nadar hacia arriba o hacia abajo en gradientes de estímulo, incluso aquellos demasiado débiles para ser sentidos directamente por la partícula.
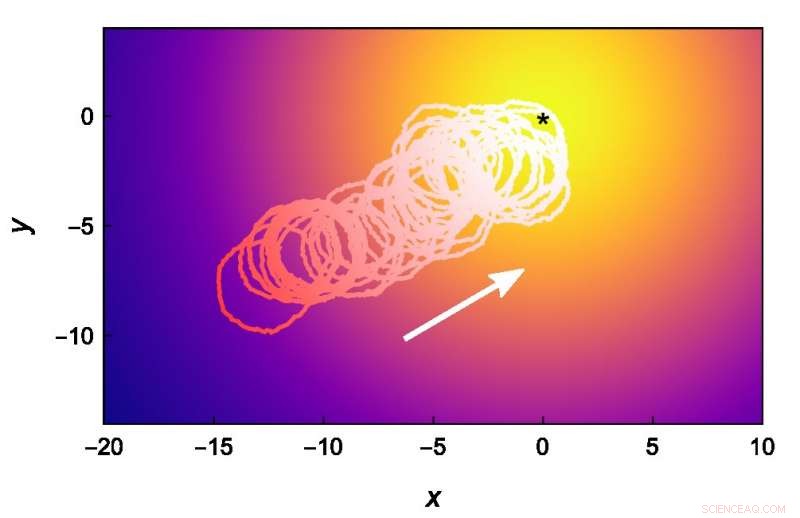
Trayectoria de navegación simulada en entornos ruidosos y complejos. Crédito:Yong Dou / Columbia Engineering
"Por primera vez, mostramos cómo los materiales receptivos podrían usarse como computadoras de a bordo para robots a microescala, más pequeño que el grosor de un cabello humano, que están programados para navegar de forma autónoma, "dice Yong Dou, coautor del estudio y Ph.D. estudiante en el laboratorio de Bishop. "Estos microrobots podrían realizar tareas más complejas, como la detección distribuida de defectos materiales, entrega autónoma de carga terapéutica, y reparaciones de materiales bajo demanda, células, o pañuelos ".
El equipo de Bishop ahora está preparando experimentos para demostrar en la práctica su estrategia de navegación teórica para microrobots, utilizando materiales que cambian de forma, como elastómeros de cristal líquido y aleaciones con memoria de forma. Esperan mostrar que los experimentos probarán que los estímulos sensibles, Las micropartículas que cambian de forma pueden utilizar la retroalimentación diseñada entre la detección y el movimiento para navegar de forma autónoma.